EMISSION-RECEPTION RTTY
J.C PIAT - F2ES
Editions Techniques et Scientifiques Françaises
2 à 12 rue de Bellevue, 75019 PARIS
Diffusion :
AGENCE PARISIENNE DE DISTRIBUTION
43, rue de Dunkerque, 75010 PARIS
Numérisation et mise en page Pascal CHOUR - 2013-2014
Il existe un certain nombre d'ouvrages destinés aux professionnels qui utilisent couramment les téléimprimeurs dans toutes leurs applications, mais nous n'avons jamais trouvé un livre qui traite à la base des communications par voie hertzienne à l'aide des téléimprimeurs.
Au moment d'aborder la construction d'une station RTTY, nous avons donc cherché dans les revues étrangères tout ce qui avait un rapport avec ce sujet et nous nous sommes adressés aux constructeurs de téléimprimeurs dans le but de parfaire nos connaissances dans ce domaine.
Nos lecteurs trouveront dans ce livre le reflet d'une expérience personnelle et nous espérons qu'ils pourront obtenir dans la progression de leurs réalisations les mêmes satisfactions que nous avons pu tirer de notre travail durant les quelques mois nécessaires à la construction d'un ensemble de communication RTTY.
Nous tenons à remercier la société SAGEM qui a bien voulu nous autoriser à reproduire une partie de la documentation d'un de ses équipements destinés à une utilisation professionnelle et que les radioamateurs peuvent se procurer actuellement dans les magasins spécialisés.
CHAPITRE PREMIER
QU'EST-CE QUE LA RTTY ?
De plus en plus dans les bandes amateurs, on entend parler de RTTY au cours des liaisons, le nombre des stations équipées croissant d'une manière régulière.
Beaucoup en parlent, souhaitent la pratiquer mais en ignorent tout ou presque, c'est pourquoi dans ce premier chapitre nous allons partir de la base et situer ce mode de communication par rapport aux plus courants, que chaque amateur doit (ou devrait) connaître.
Pour dégrossir le problème nous dirons que le système s'apparente à la télégraphie, le travail mental efTectué par l'opérateur télégraphiste étant dans le cas de la RTTY accompli par la machine ou TTY couramment appelée téléimprimeur ou encore téléscripteur.
En remontant un peu dans le temps, on trouve, en effet, comme premier système de communication électrique la télégraphie qui aura l'exclusivité pendant de nombreuses années en raison de la simplicité des systèmes de transmission et de réception. Un inconvénient toutefois, la nécessité de placer en permanence aux deux extrémités de la ligne de transmission des opérateurs qui parlent le même langage pour pouvoir se comprendre.
Si le code Morse a été créé et utilisé à travers le monde, c'est pour permettre à tous les opérateurs d'échanger des informations, mais ce système exige des qualités, de la part de ceux qui ont à recevoir et à transmettre que tout le monde ne possède pas, d'où une sélection systématique et des problèmes divers.
Avant la Seconde Guerre mondiale apparaît une machine appelée « télétype » (des mots anglais Telegraph et Typewriter : machine à écrire) fabriquée par la Société Télétype Corporation. Cette appellation télétype utilisée généralement pour désigner les téléimprimeurs ou téléscripteurs est en fait une marque déposée d'où l'abréviation générale donnée à ce genre de machine : TTY.
A l'origine, les appareils étaient reliés entre eux par des lignes dont le rôle était de véhiculer les informations, mais il est bien vite apparu qu'il était possible d'effectuer les liaisons par voie hertzienne ce qui simplifiait considérablement le problème au prix de modifications mineures sur l'appareil d'origine. C'est ainsi que naquit la radio TTY ou encore RTTY.
L'utilisation de ces machines était à l'origine réservée aux services officiels, mais petit à petit des radios-amateurs ont pu s'en procurer et réaliser entre eux les premières liaisons amateurs en RTTY, ouvrant ainsi la voie à un nombre grandissant de passionnés de ce mode de communication à distance.
A l'heure actuelle cependant, ce système de communication est relativement peu utilisé chez les amateurs français bien qu'il soit possible de se procurer à des prix raisonnables des téléimprimeurs de surplus sur lesquels, évidemment, il est nécessaire d'effectuer une remise en état, nettoyage, graissage, etc..., qui prendra peu ou beaucoup de temps suivant les cas. Il s'agit, c'est certain, d'un travail quelquefois fastidieux, mais les curieux - et la curiosité est une qualité essentielle d'un amateur - trouveront en même temps le moyen de se familiariser avec la mécanique et les circuits électriques de ces machines à l'aspect complexe. Il est naturellement possible d'acquérir également une machine neuve !
Le but théorique de l'amateur étant de chercher un domaine d'activités peu exploré et d'apporter sa contribution, aussi minime soit elle à la vulgarisation de celui-ci, nous pensons que la RTTY peut encore être considérée, de même que la télévision d'amateur ou les liaisons en VHP et UHF pour ne citer que ces exemples, comme une voie peu encombrée où il reste beaucoup à faire.
Les différentes étapes
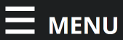
La première étape à franchir est bien évidemment de se procurer un téléimprimeur et de le faire fonctionner sans le raccorder à l'équipement de la station, ce qui revient à vérifier qu'il se comporte comme une machine à écrire. Pour ce faire, on effectuera le branchement comme indiqué figure 1.1 et on essaiera d'imprimer sur une feuille de papier en appuyant sur les touches correspondantes la phrase suivante : The quick brown fox jumps over thé lazy dog back, dans laquelle toutes les lettres de l'alphabet sont utilisées. On s'assurera également du fonctionnement des chiffres et des différentes touches du clavier.
Auparavant, il faudra vérifier la tension d'alimentation du moteur, un certain nombre de machines d'origine américaine étant prévues pour une tension de 110 ou 127V ÇA. Il est peu probable, sauf s'il s'agit d'une machine révisée par le vendeur, que le fonctionnement se révèle être correct du premier coup, et il faudra chercher, nettoyer, graisser (toujours légèrement et avec une graisse pour petite mécanique de précision). Attention aux coups de tournevis donnés au hasard qui peuvent être la cause d'une remise en état plus longue. Généralement les différentes parties peuvent se dissocier facilement, ce qui rend les recherches et le nettoyage plus faciles, mais il faudra toujours procéder à la séparation des blocs avec précaution pour ne pas détériorer les pièces. Certaines, en effet, sont assez fragiles et il existe toujours le risque de déformer les ressorts ou même de les casser. En résumé il s'agit d'une mécanique suffisamment précise et complexe pour la traiter avec tout le soin nécessaire.
Il sera bon de vérifier également les contacts électriques et de les nettoyer, l'endroit de stockage des appareils de surplus n'étant pas toujours celui qui convient à un tel matériel.
A moins de disposer de la notice complète du téléimprimeur, il faut avancer lentement et en tout cas chercher à savoir quelle est la fonction de tous les leviers, ressorts et autres pièces mécaniques. Quand on possède enfin une machine à écrire fonctionnant correctement on peut envisager de recevoir des signaux RTTY. C'est alors qu'il faudra construire un convertisseur qui transformera les signaux issus du récepteur en impulsions de courant nécessaires à la commande de l'électro-aimant. Ce convertisseur peut être simple ou très évolué, mais sans lui il est impossible de copier un message.
Enfin pour ceux qui en ont l'autorisation, il restera l'étape de l'adaptation du téléimprimeur à l'émetteur ce qui peut se faire de différentes manières comme nous le verrons plus loin.
Les techniques
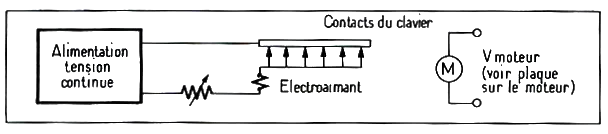
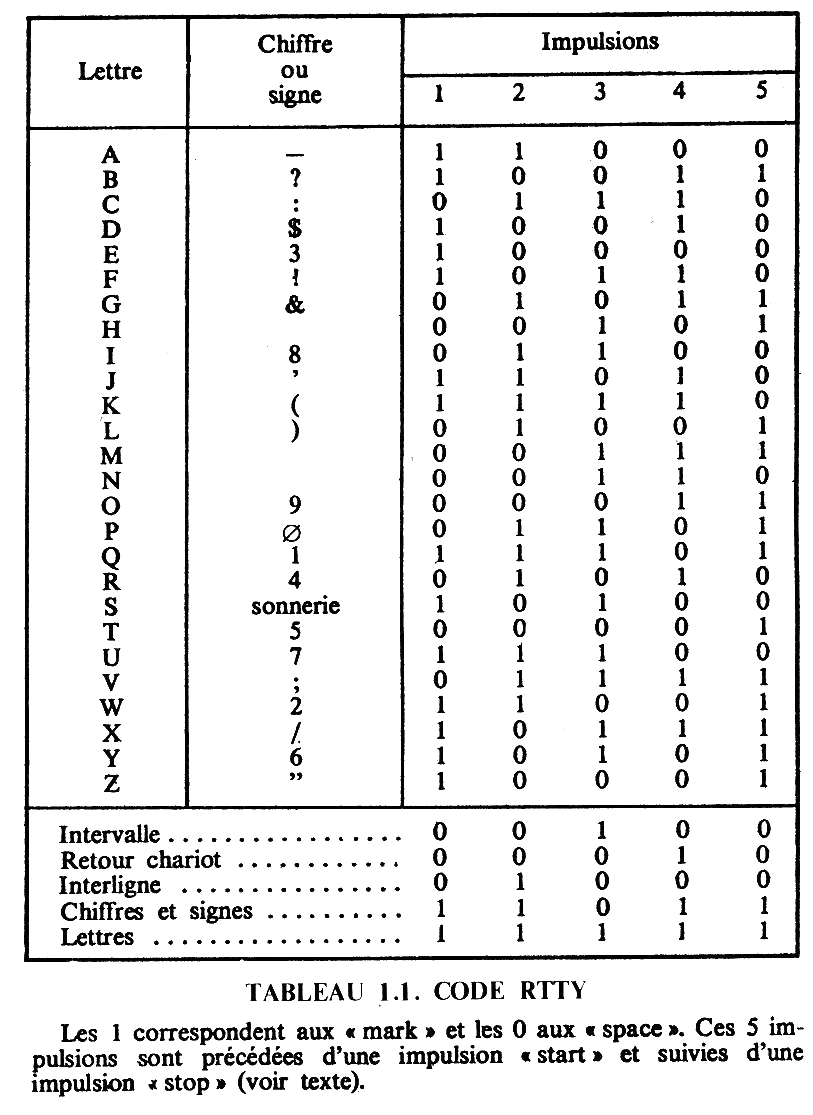
Ainsi que nous avons eu l'occasion de le dire précédemment le principe de transmission s'apparente à celui du morse puisque l'on distingue également deux états, un état « repos » et un état « travail » qui peuvent être utilisés de plusieurs façons. Alors qu'en morse il existe les points, les traits et trois intervalles de durées différentes, en RTTY chaque lettre est caractérisée par cinq impulsions consécutives de même durée qui peuvent être positives ou négatives les impulsions positives (présence de courant) étant appelées « mark » et les impulsions négatives « space ». Dans un système binaire, cinq impulsions nous donnent la possibilité de réaliser 25 = 32 combinaisons, donc la possibilité de coder tout l'alphabet mais dans certains cas il a été nécessaire de réaliser des codes à six impulsions. Là n'est pas notre propos et dans l'immédiat nous en resterons au code à 5 impulsions appelé, dans la pratique, code à 5 moments.
Les différentes combinaisons de ces 5 impulsions vont donc nous permettre de caractériser chaque lettre de l'alphabet, mais il reste les signes et les chiffres et l'idée d'une inversion lettres/chiffres a été mise en pratique pour répondre aux nécessités.
On prévoit donc sur le clavier deux touches qui lorsqu'elles sont sollicitées envoient un signal plaçant la machine en position lettres ou en position chiffres ce qui correspond sensiblement aux positions minuscules et majuscules d'une machine à écrire normale. Tous les caractères transmis a près un ordre d'inversion seront conformes à Tordre donné par celui-ci.
Un autre problème qui est apparu au début de l'utilisation des téléimprimeurs est celui de la synchronisation de la machine émettrice et de la machine réceptrice. Bien sûr il est nécessaire que les vitesses de rotation des deux machines soient identiques ou presque afin qu'elles génèrent des impulsions caractéristiques de mêmes durées, mais il faut aussi que la machine réceptrice « ouvre » sa mémoire en même temps que la machine émettrice commence à transmettre une suite de 5 impulsions. Pour résoudre ce problème il a été prévu d'encadrer les 5 impulsions caractéristiques par une impulsion « start » qui donnera l'ordre à la machine réceptrice de se préparer à recevoir le caractère transmis et une impulsion « stop » qui fera savoir à cette même machine que le caractère a été transmis et la maintiendra dans une position d'attente jusqu'à la prochaine impulsion start. L'impulsion start correspond à une coupure du courant dans l'électro-aimant donc à un space, alors que l'impulsion stop correspond à la présence d'un courant donc à un mark. (Elle est plus longue que les autres impulsions : voir ci-dessous).
En ce qui concerne la vitesse, les stations commerciales transrnettent selon le code CCIT n° 2 à la vitesse de 50 bauds ce qui correspond à des impulsions d'une durée de 20 ms, alors que les stations d'amateurs sont autorisées à transmettre à la vitesse de 45,45 bauds soit des impulsions de 22 ms. Il conviendra donc de s'assurer avant toute réception ou émission de la vitesse de la machine sous peine de ne pas obtenir une réception correcte ou de ne pas être reçu, les vitesses ne concordant pas.
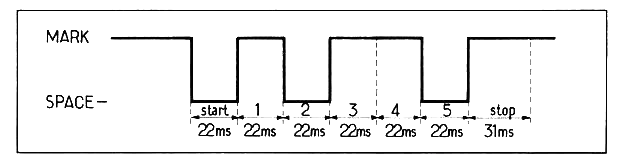
D'après ce que nous venons de dire, il est possible de représenter un caractère comme indiqué figure 1.2. L'on remarquera que l'impulsion stop est plus longue que les autres, elle dure en effet 31 ms. Pour la transmission totale d'un caractère il faudra donc :
Toutes les lettres seront définies par une succession de « mark » et « space », chaque combinaison étant, bien entendu, différente des autres et correspondant à ce qui est indiqué dans le tableau 1.1. L'association lettre/chiffre ou signe peut changer suivant les machines, mais ceci est en général assez peu ennuyeux étant donné que les différences portent sur des signes de ponctuation. Nous avons reporté dans le tableau 1.1 l'association considérée comme standard par les Américains.
Cela défini, il faut utiliser ces impulsions pour commander l'émetteur chargé de les transmettre jusqu'à la station réceptrice et il existe plusieurs solutions pour y parvenir, chacune ayant ses avantages et ses inconvénients.
La première solution adoptée à l'origine et seule admise pendant un certain temps possédait l'avantage d'être la plus simple puisque l'émetteur fonctionnait comme en télégraphie par tout ou rien. L'inconvénient majeur d'une telle solution résidait dans le fait que la réception des messages se trouvait fortement affectée par les parasites et les conditions de propagation.
La seconde, plus courante et qui le sera de plus en plus en raison de l'utilisation généralisée des transceivers BLU, est appelée AFSK abréviation de « audio frequency shift keying » ou commande par changement de fréquence audible. On dispose d'un oscillateur basse fréquence qui par commutation peut osciller sur deux fréquences différentes, l'une caractéristique du mark et l'autre caractéristique du space.
Il semble d'après l'ensemble des articles que nous avons pu lire dans les revues américaines que les deux fréquences considérées comme standard sont 2.125Hz pour le mark et 2.975Hz pour le space, c'est-à-dire qu'une station en position standby qui doit transmettre un mark en permanence est modulée par un signal basse fréquence de 2.125Hz.
L'écart entre les deux fréquences appelé shift est, dans le cas général, de 850Hz, mais on trouve maintenant des amateurs, qui utilisent un shift de 170Hz, la fréquence des mark restant de 2.125Hz et la fréquence du space devenant 2.295Hz.
Il existe deux autres groupes de fréquences plus basses qui sont utilisées lorsque les filtres limitent la bande passante à moins de 3 kHz, il s'agit de 1.275Hz/2.125Hz pour un shift de 850Hz et 1.275Hz/1.445Hz pour un shift de 170Hz.
Troisième solution très utilisée également, il s'agit du FSK (abréviation de « frequency shift keying » c'est-à-dire commande par variation de fréquence porteuse). Dans ce cas, on fait varier la fréquence porteuse correspondant au mark d'une valeur égale au shift choisi soit 850 ou 170Hz.
La plus haute des deux fréquences porteuses est généralement choisie pour les « mark » et par voie de conséquence la plus basse correspond aux « space ».
A la réception, si nous excluons le fonctionnement par tout ou rien, on peut obtenir soit deux fréquences BF parfaitement connues soit une variation de fréquence porteuse, cette variation étant égale à la différence entre les deux fréquences BF du premier cas. Il est possible de transformer au niveau du récepteur une variation de fréquence porteuse en variation de fréquence BF, en faisant battre le signal reçu avec le signal fourni par le BFO (beat frequency oscillator) dudit récepteur. Ainsi une variation de la fréquence porteuse égale à 850Hz se traduira par une variation de la fréquence BF résultante de 850Hz également. Il est donc possible de restituer avec le BFO deux fréquences BF identiques à celles qui auraient été fournies par un modulateur AFSK, en jouant sur le réglage de l'oscillateur de battement.
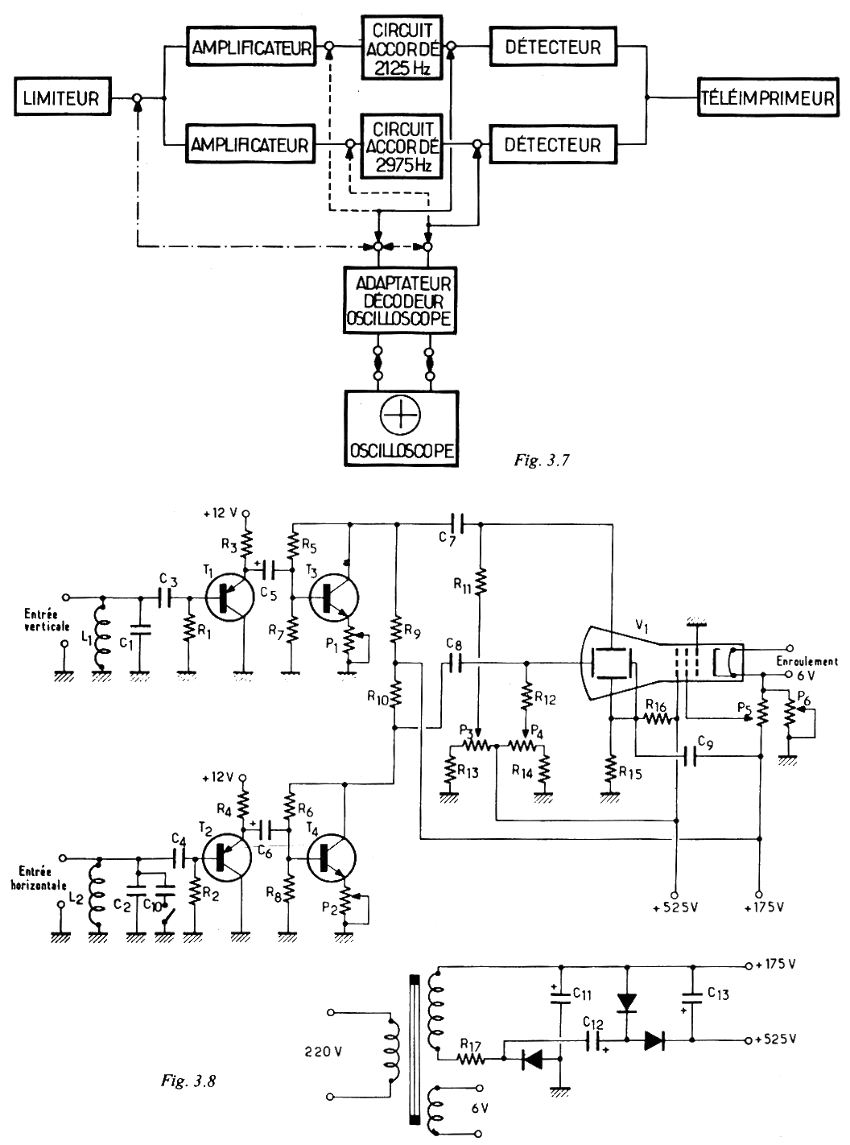
Donc, au niveau de la réception, il faudra différencier si l'on s'en tient au shift standard de 850Hz, les deux fréquences 2.125Hz et 2.975Hz ; ce sera le rôle du convertisseur (encore appelé décodeur ou démodulateur).
Nombre de versions de cet appareil ont été réalisées et décrites, de la plus simple à la plus complète et nous décrirons par la suite quelques réalisations fort intéressantes que nous avons eu l'occasion d'expérimenter.
Le rôle du convertisseur est de transformer la variation de fréquence BF en impulsions qui commandent l'électro-aimant du téléimprimeur et donc l'impression des caractères sur le papier.
Généralement on utilise pour reconnaître les signaux mark et space deux filtres accordés sur les fréquences correspondant à ceux-ci. L'apparition de nouveaux circuits intégrés permet de supprimer les filtres utilisant les selfs bien connues de 88 mH réalisées avec des tores ou des pots ferrites.
Dans le cas de signaux FSK, il faut bien entendu disposer d'un récepteur aussi stable que possible dont le BFO ne dérive pas, car le glissement en fréquence de l'un ou l'autre entraîne automatiquement la variation des deux fréquences caractéristiques des mark et des space, la différence entre celles-ci restant constante. Comme les filtres sont assez sélectifs, il pourrait arriver un moment où les deux fréquences BF seraient telles qu'on ne détecterait que des tensions insuffisantes pour obtenir un fonctionnement correct du convertisseur.
Il existe des remèdes divers aux glissements de fréquence ; on peut par exemple, réaliser un système de contrôle automatique de fréquence, ou encore utiliser un générateur BC221 connu pour sa grande stabilité au lieu de mettre en service le BFO du récepteur.
Il est possible et même conseillé d'ajouter aux circuits de détection du convertisseur différents étages qui rendent son utilisation beaucoup plus souple et suppriment les désagréments qui peuvent apparaître lorsque les conditions de réception ne sont pas bonnes. On peut alors dérouler du papier et ne lire que des suites incohérentes de caractères. Ainsi il est possible de prévoir un circuit anti-space dont le rôle est de bloquer la machine lorsqu'un signal space est détecté pendant un temps supérieur à la durée de transmission d'un caractère ce qui n'est pas possible dans les conditions normales puisque à la suite des 5 impulsions caractéristiques apparaît obligatoirement un mark.
On peut également prévoir un système de démarrage automatique (appelé auto-start outre-Atlantique) qui assurera la mise en roufe du téléimprimeur seulement si un signal RTTY a été détecté, ce qui évite au moteur de fonctionner en permanence, si l'on souhaite rester à l'écoute d'une fréquence particulière, vingt-quatre heures sur vingt-quatre.
Pour le réglage de l'émetteur et du récepteur on peut envisager la réalisation d'indicateurs d'accord avec un œil magique, un galvanomètre ou mieux un tube cathodique. Nous allons dans les chapitres qui suivent reprendre ces différents sujets et les détailler autant que cela sera nécessaire afin de les mettre à la portée de chacun.
CHAPITRE 2
CONVERTISSEURS POUR LA RÉCEPTION DES SIGNAUX RTTY
II existe de nombreuses formules de convertisseurs mais tous sont basés sur le même principe et ne peuvent se différencier que par des points très précis. Tous sauf le tout dernier dont nous ayons eu connaissance et qui a pu être réalisé grâce à l'apparition sur le marché de nouveaux circuits intégrés très élaborés.
Le rôle du convertisseur est de transformer les variations de fréquence en variations de tension qui commanderont les bobines de l'électro-aimant.
Pour ce faire, étant donné que les mark et les space sont caractérisés par deux fréquences espacées de 850Hz en règle générale et de 170Hz dans certains cas particuliers, il faut simplement séparer ces deux fréquences et le moyen le plus simple qui vient immédiatement à l'esprit consiste à utiliser deux filtres passe-bande, chacun accordé sur une fréquence déterminée. Dans le cas du shift (variation de fréquence) de 850Hz ces deux fréquences sont 2.125Hz et 2.975Hz, alors que pour le shift de 170Hz, ces deux fréquences sont 2.125Hz et 2.295Hz. La fréquence commune aux deux shift est celle des signaux mark.
La tension recueillie en sortie de ces filtres est ensuite utilisée pour commander des éléments fonctionnant par tout ou rien, transistors ou comparateurs en circuit intégré, qui eux-mêmes feront fonctionner l'électro-aimant.
Il faut bien évidemment obtenir des impulsions de commande aussi propres que possible afin d'éviter des erreurs d'impression de la machine, car sauf dans le cas d'une machine mal entretenue ou mal révisée, les erreurs sont dues au convertisseur non qu'il soit en panne mais parce qu'il est trop sensible aux variations du niveau d'entrée, aux parasites, etc.
Chacun doit donc choisir un convertisseur qui soit aussi performant que possible dans la limite de ses moyens personnels, et pour cela, nous avons choisi d'étudier dans le détail trois convertisseurs, le second étant la version améliorée du premier.
Nous avons systématiquement éliminé tous les convertisseurs à lampes, car pour la construction d'une station RTTY à l'heure actuelle il est peu pensable d'utiliser autre chose que des transistors et des circuits intégrés, l'intérêt de ceux-ci dans ce domaine n'étant plus à démontrer.
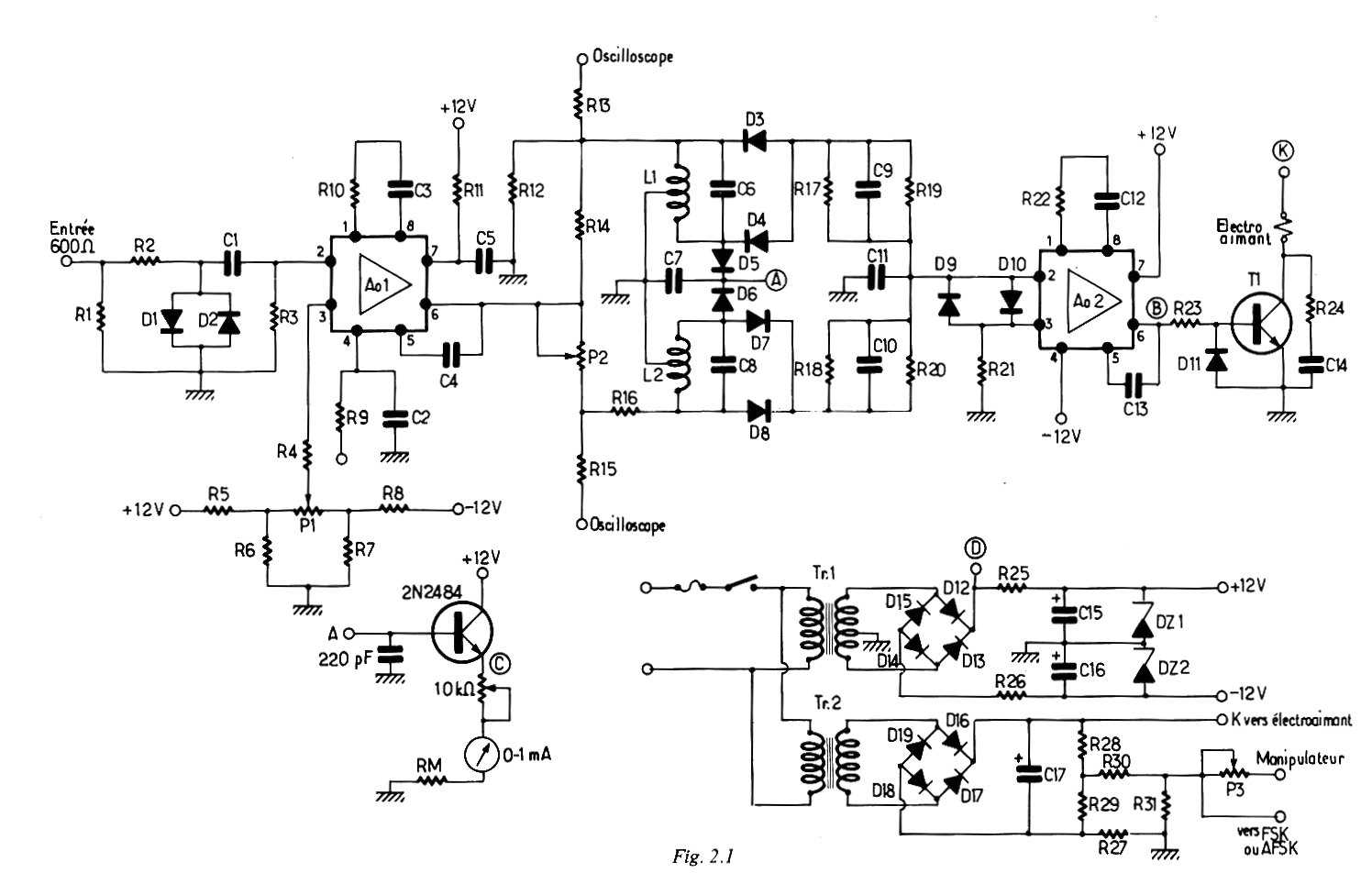
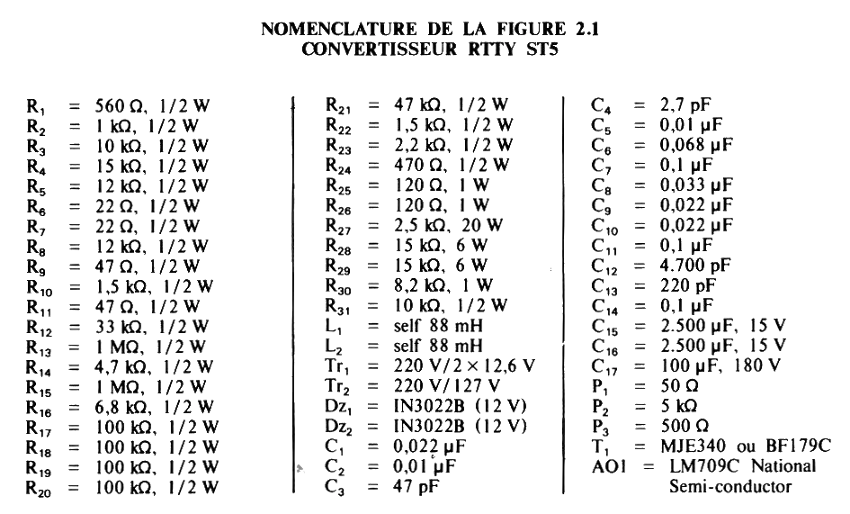
Ce convertisseur est l'un des plus simples existant actuellement, présentant de grandes qualités et qui peut servir de point de départ à la construction d'un autre convertisseur plus complet, plus performant mais également d'un prix de revient plus élevé : le ST6, que nous décrirons plus loin. Toutefois, et nous en avons fait l'expérience, la construction du ST5 est une excellente méthode pour se familiariser avec la réception et le décodage des signaux RTTY, en outre il est possible de se servir des circuits imprimés du ST6 pour le monter.
Cet appareil utilise seulement deux amplificateurs opérationnels dont nous ne rappelerons ni les propriétés ni les avantages, ceux-ci ayant été maintes fois détaillés dans différentes revues. Il est possible de décomposer le schéma en plusieurs sous-ensembles que nous analyserons séparément afin de mieux en assimiler le 'fonctionnement. Ainsi on peut dissocier, le limiteur, le discriminateur, le comparateur, la commande de l'électro-aimant, les alimentations haute et basse tensions.
Le limiteur
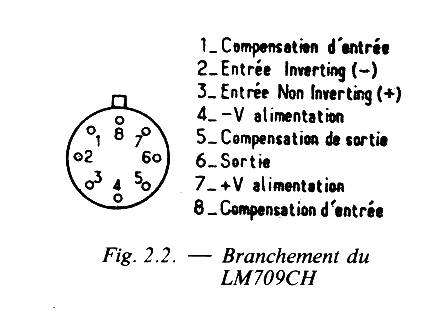
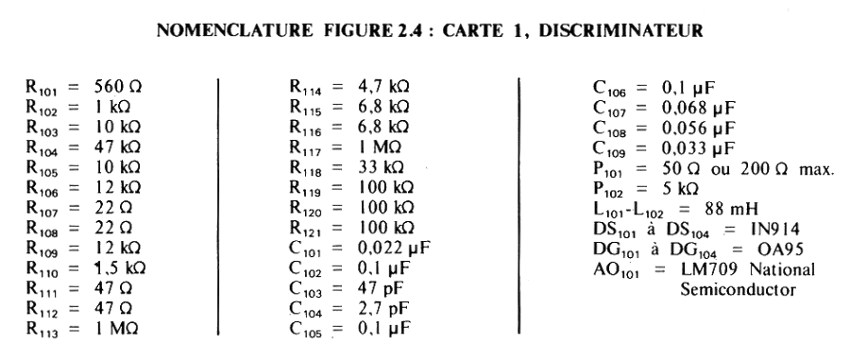
Les amplificateurs opérationnels utilisés, du type µA 709, ont un gain supérieur à 90 dB et se révèlent être, de ce fait, fort bien adaptés à la réalisation d'étages limiteurs. Pour protéger les entrées de l'amplificateur il a été prévu deux diodes qui peuvent être des 1N914 (ce sont des diodes de commutation rapide et un autre type peut convenir) ou des diodes Zener de 3,6 ou 3,9V à coude franc. En effet il est essentiel que la tension différentielle d'entrée ne dépasse pas 5V, ce qui pourrait se produire lorsque le signal basse fréquence croît d'une manière importante.
En sortie de l'étage limiteur on trouve des signaux carrés, et ceci pour une tension à l'entrée de 200 pV environ.
Les amplificateurs opérationnels présentant une tension d'offset variable de l'un à l'autre, il a été nécessaire de prévoir un système de compensation comportant quatre résistances et un potentiomètre de quelques dizaines ou quelques centaines d'ohms ayant une piste moulée de préférence, le passage d'une spire à l'autre avec un potentiomètre bobiné pouvant empêcher un réglage correct de cette compensation, car la résolution n'est pas infinie, et le gain de l'amplificateur très élevé.
Le discriminateur
Basé sur le même principe que les discriminateurs utilisés en modulation de fréquence, le discriminateur se compose de deux circuits accordés sur les fréquences les plus utilisées à savoir 2.125 et 2.975Hz dans un cas considéré comme standard, et 1.275-2.125Hz dans l'autre.
Ceci pour un « shift » de 850Hz car pour les stations qui utilisent un shift de 170Hz, il n'a pas été prévu de commutation sur cet appareil contrairement au ST6 que nous détaillerons plus loin, mais il serait possible de reprendre les valeurs indiquées pour le ST6 afin de les adapter au ST5.
Les tensions en sortie de chaque filtre sont ensuite redressées et lissées pour commander le comparateur.
Le comparateur
Cet étage est composé d'un amplificateur opérationnel monté en comparateur, c'est-à-dire non bouclé donc présentant un gain très élevé. Qu'en résulte-t-il ? Simplement lorsqu'un signal de très faible valeur est appliqué à l'entrée, la tension de sortie passe instantanément à sa valeur de saturation soit 10 à 11V.
Ainsi avec une tension de l'ordre de 100 µV l'amplificateur sera complètement saturé et on trouvera en sortie une tension de + ou - 10 à 11V le signe dépendant de la polarité de la tension d'entrée. Pour les « mark » l'amplificateur se saturera en positif et pour les « space » en négatif.
Commande de l'électro-aimant
Il serait possible d'utiliser un relais reed dont le temps de réponse est très court pour commander l'excitation ou la désexcitation de l'électro-aimant, mais il est plus simple et plus élégant d'utiliser un transistor haute tension comme celui indiqué à savoir un MJE340 fabriqué par Motorola et prévu pour fonctionner sous 300V, avec un temps de réponse infiniment plus faible qu'un relais reed. Son gain est largement suffisant pour commuter franchement les 60 mA que consomme la bobine de l'électro-aimant. Pour la puissance, ce transistor n'a pratiquement rien à dissiper puisque, à l'état conducteur, la tension entre collecteur et émetteur est la tension de saturation donc pratiquement zéro, aussi les 25 W dissipables par ce transistor sont-ils largement suffisants. Il serait possible d'utiliser d'autres transistors de puissance plus faible tels le BF179C mais nous disposions du, MJE340 et nous l'avons utilisé sans regarder le problème plus en détail.
Deux circuits de protection ont été prévus pour ce transistor, l'un pour protéger la jonction base émetteur dans le cas où en sortie du comparateur on trouve une tension de -10V, et il s'agit simplement d'une diode qui limite la tension à -0,6V sur la base par rapport à l'émetteur, et l'autre pour protéger le transistor contre les surtensions qui se développent aux bornes de la self constituée par la bobine de l'électro-aimant au moment de la commutation, il s'agit là d'un simple circuit RC.
Alimentation haute tension
La tension nécessaire est de l'ordre de 160 à 170V ce qu'il est possible d'obtenir avec un transformateur 220/127V en utilisant le circuit représenté sur le schéma. Comme indiqué précédemment, le courant à fournir est de l'ordre de 60 mA, cette valeur n'étant d'ailleurs pas très critique, il faudra calculer la résistance de puissance prévue en série avec l'électro-aimant en fonction du transformateur utilisé, les 2.500ohms indiqués sur le schéma étant un cas particulier. Nous pensons même qu'il serait préférable de diviser cette résistance en deux de façon à n'utiliser que des composants de dimension raisonnable et dont la température en surface reste relativement basse (100 à 150°C).
On trouve également dans cette alimentation les circuits annexes destinés à la commande d'un émetteur lorsqu'on souhaite transmettre en RTTY.
Alimentation basse tension
Les amplificateurs opérationnels utilisés doivent être alimentés en positif et en négatif, la tension pouvant être comprise entre 10 et 18V. Ce point est à vérifier sur la fiche du constructeur. Aucune régulation autre qu'une diode Zener n'a été prévue, mais nous conseillons toutefois une régulation un peu plus poussée bien que restant très simple et qui a été utilisée dans le ST6, elle ne nécessite guère qu'un transistor en plus pour chaque polarité.
Selon le transformateur utilisé il s'avérera peut-être nécessaire de changer la résistance chutrice de 120ohms qui également correspond à une tension secondaire donnée. Si aucune précaution n'est prise on risque de n'avoir plus de courant dans la diode Zener donc mauvaise régulation ou trop de courant donc trop de puissance à dissiper par la diode et destruction de celle-ci à plus ou moins longue échéance. Les condensateurs de filtrage devront être des 2.500 µF minima et avoir une tension de service de 15V environ.
Indicateur d'accord
Comme cela apparaît sur le schéma de principe, il est prévu des sorties vers les plaques horizontales et verticales d'un oscilloscope (les signaux « mark » en horizontal et les signaux « space » en vertical) , mais à défaut d'un tel appareil, il est possible d'utiliser un voltmètre qui, connecté au point A, doit donner des indications identiques pour les « mark » et les « space », et compte tenu de l'inertie de l'aiguille d'un appareil à cadre mobile, lors de la réception d'un signal RTTY, l'aiguille doit rester stable.
Un transistor NPN quelconque et un milliampèremètre dont on réglera la déviation maximale à l'aide d'un potentiomètre monté en résistance variable sont seuls nécessaires pour réaliser cet indicateur d'accord.
Mise au point
Avant de mettre en service l'appareil, il est nécessaire de procéder à deux réglages très simples.
Tout d'abord, il faut compenser la tension d'offset du limiteur en ajustant le potentiomètre P1 : pour cela, déconnecter l'entrée et mesurer la tension en sortie du limiteur, c'est-à-dire sur la borne 6 ; en jouant sur P,, on doit amener cette tension à zéro. Compte tenu du gain du limiteur le réglage est assez délicat et il sera bon d'utiliser pour P, un potentiomètre ayant une résolution aussi importante que possible, nous conseillons pour notre part un potentiomètre miniature multitours à piste cermet (céramique-métal).
Lorsque ce réglage a été effectué, reconnecter l'entrée du convertisseur à la sortie du récepteur et régler celui-ci sur un signal « mark ». Noter la valeur maximale qu'il est possible d'obtenir sur un voltmètre ou sur l'indicateur d'accord connecté au point A, et régler le récepteur sur un signal « space ». Lire la valeur de la tension obtenue au point A et ajuster, si cela est nécessaire, le potentiomètre P2 pour obtenir la même déviation qu'avec le signal « mark».
Les réglages sont terminés, il ne reste qu'à alimenter la machine pour recevoir les premiers signaux cohérents sur le papier.
Nous avons examiné dans le détail le ST5, et nous allons retrouver dans le ST6 les mêmes éléments de base auxquels ont été ajoutés des circuits complémentaires qui permettent d'obtenir des performances sensiblement supérieures et une utilisation plus souple. Néanmoins le ST5 reste à notre avis un excellent appareil pour débuter dans ce type de réception, le passage du ST5 au ST6 pouvant s'effectuer facilement si l'on utilise au départ des circuits imprimés prévus pour le ST6 que nous avons étudiés et réalisés pour notre propre compte.
De quoi se compose le ST6, c'est ce que nous allons voir maintenant. Nous trouvons d'abord le même étage limiteur que sur le ST5, suivi d'un filtre actif passe-bas auquel a été ajouté un dispositif de contrôle automatique de niveau, pour attaquer correctement le comparateur qui commande le transistor de commutation haute tension. Ceci concerne la partie détection et il a été ajouté, pour augmenter les possibilités d'utilisation de l'appareil, un circuit appelé antispace dont le rôle est d'éviter l'impression de caractères en l'absence de signal RTTY réel, un circuit de démarrage automatique ou autostart, et enfin un circuit appelé « standby » qui comme son nom l'indique permet de mettre l'ensemble au repos sans couper pour autant l'alimentation, avec commande à distance pour des applications particulières. Éventuellement on peut prévoir à l'entrée un filtre passe-bande.
Reprenons donc ces différents sous-ensembles pour en examiner le fonctionnement plus en détail, ce qui facilite grandement la mise au point et un éventuel dépannage.
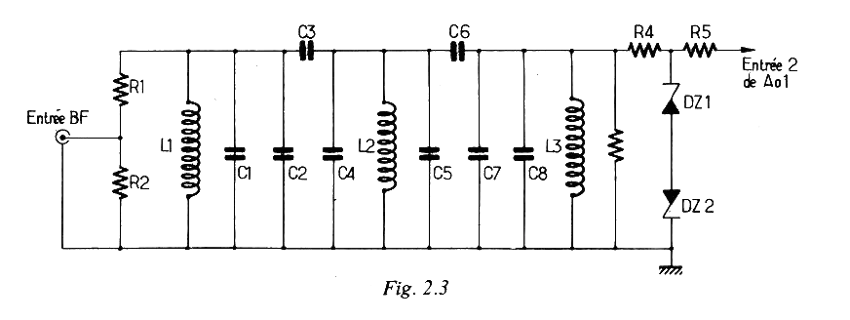
Nous n'avons pas réalisé en ce qui nous concerne le filtre passe-bande additionnel, mais pour ceux de nos lecteurs qui seraient tentés de le réaliser nous l'avons ajouté dans notre description (fig. 2.3). Il s'agit d'un filtre du type Butterworth prévu pour les shift 850Hz et 170Hz et utilisant des selfs de 88 mH dont les deux enroulements seront reliés en série dans le cas 850Hz et en parallèle dans le cas 170Hz pour arriver à la valeur d'inductance prévue qui est de 22 mH. Attention au sens de branchement des enroulements l'un par rapport à l'autre sur la même self. Les largeurs de bande sont à 3 dB de 1 kHz pour un shift de 850Hz et de 275Hz pour un shift de 170Hz.
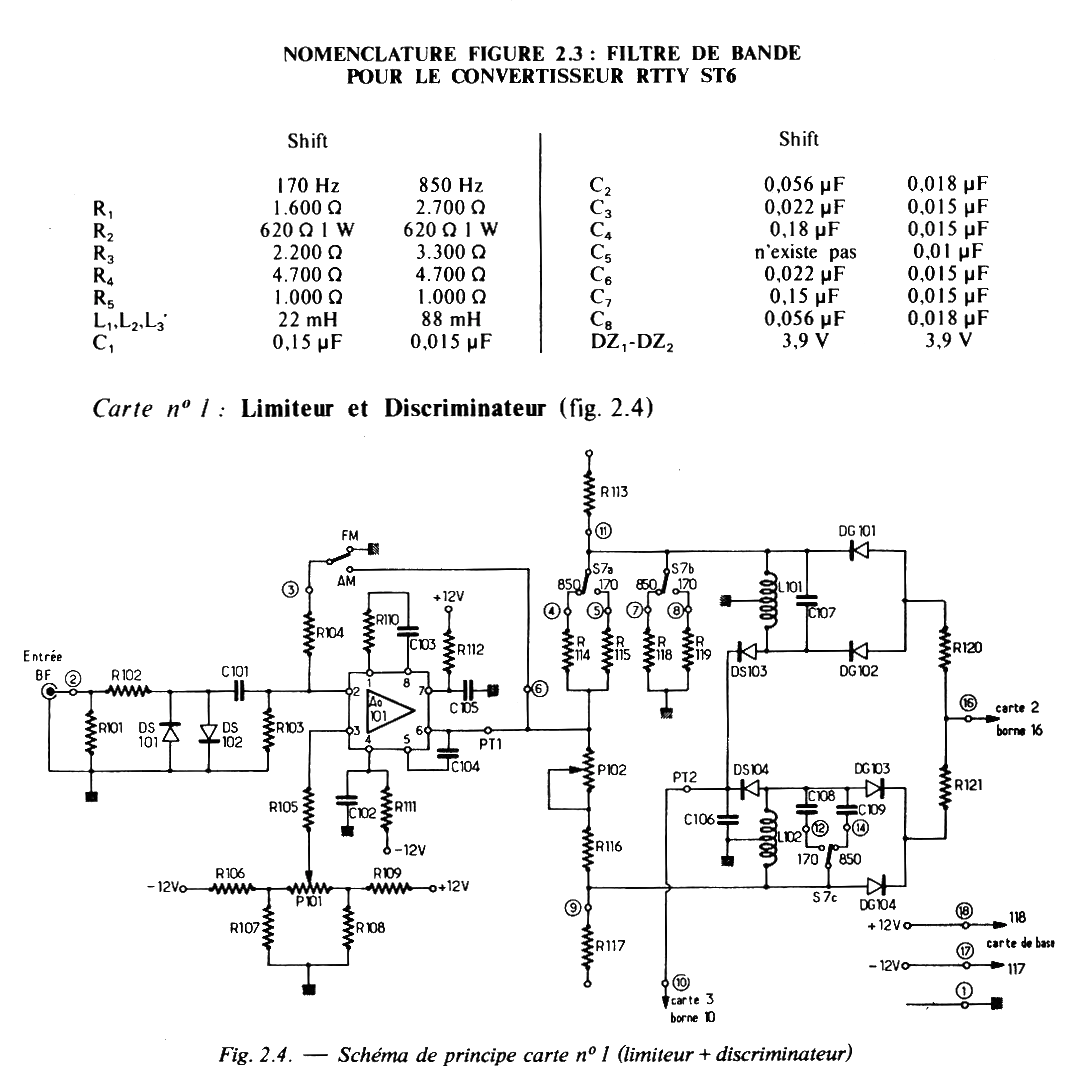
Limiteur
Le limiteur est identique à celui utilisé dans le ST5 ; il a toutefois été ajouté une commutation AM-FM qui est utilisée pour diminuer le gain de l'amplificateur en position AM, celui-ci se comportant en amplificateur linéaire pour un niveau d'entrée normal, mais comme un limiteur si on atteint une valeur excessive. La compensation de tension d'offset reste la même, et nous rappellerons qu'il faut pouvoir régler le zéro avec précision, donc qu'un potentiomètre de bonne résolution est nécessaire (un potentiomètre multitours « Cermet » convient parfaitement, mais on évitera l'utilisation de potentiomètres bobinés même multitours).
Discriminateur
Le discriminateur peut être considéré comme le cœur du décodeur, il devra en conséquence fonctionner sans défaillance, être réalisé et réglé avec soin. En particulier on s'assurera que le branchement en série des deux enroulements est réalisé correctement sinon on risque d'obtenir des résultats assez décevants, les fréquences d'accord n'ayant rien à voir avec celles normalement prévues. Les capacités devront être de bonne qualité, mylar ou polycarbonate, en tout cas éviter les condensateurs de récupération dont la qualité du diélectrique n'est pas connue ; il faut obtenir en effet, une stabilité aussi bonne que possible des circuits accordés. L'utilisation des selfs de 88 mH bobinées sur tore est la plus simple puisque ces selfs existent toutes faites, mais on peut également envisager de réaliser soi-même ce genre de selfs. Nous avons fait pour notre part nos premiers essais de décodage avec des selfs réalisées à partir de pots ferrite, la valeur d'inductance par spire étant généralement donnée par le fabricant, et certains pots pouvant être équipés d'un noyau plongeur prévu pour ajuster la valeur de la self. Attention au serrage des pots, celui-ci joue sur la valeur de la self dans certains cas.
Les tensions apparaissant aux bornes des circuits accordés sont redressées en double alternance, ce qui permet un filtrage plus aisé. On utilise également la tension en sortie de chaque filtre pour, après redressement séparé, alimenter l'indicateur d'accord incorporé d'une part, et le système de démarrage automatique.
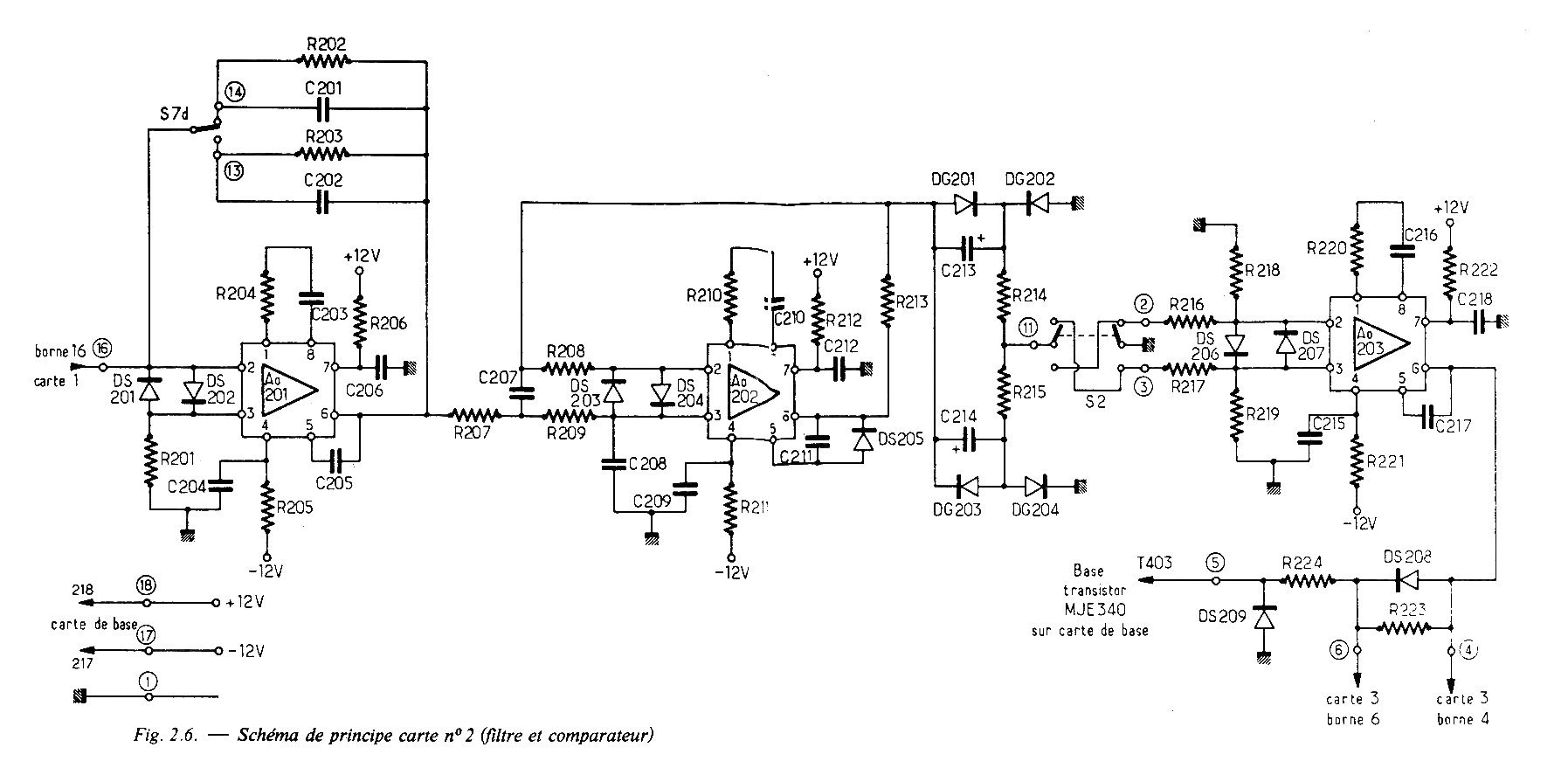
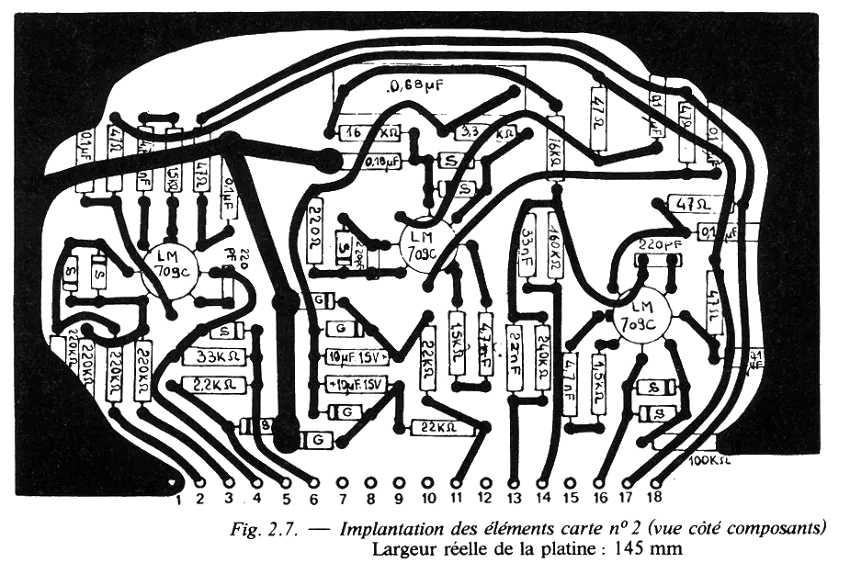
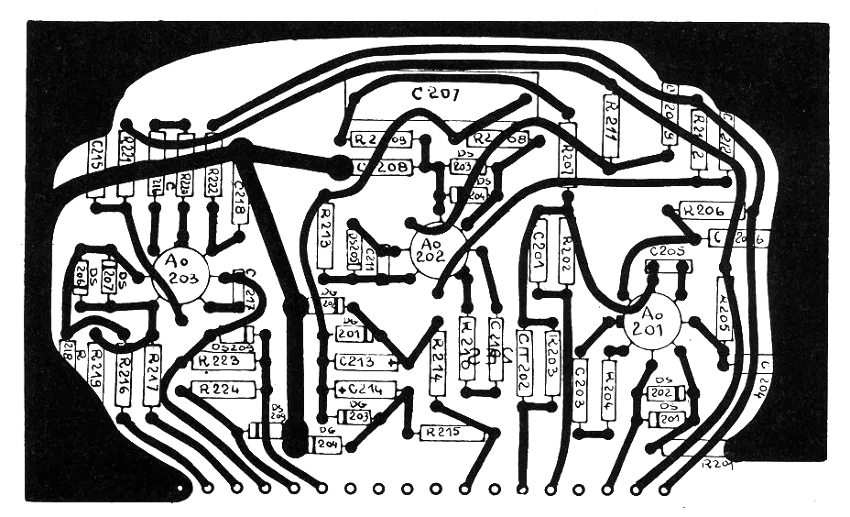
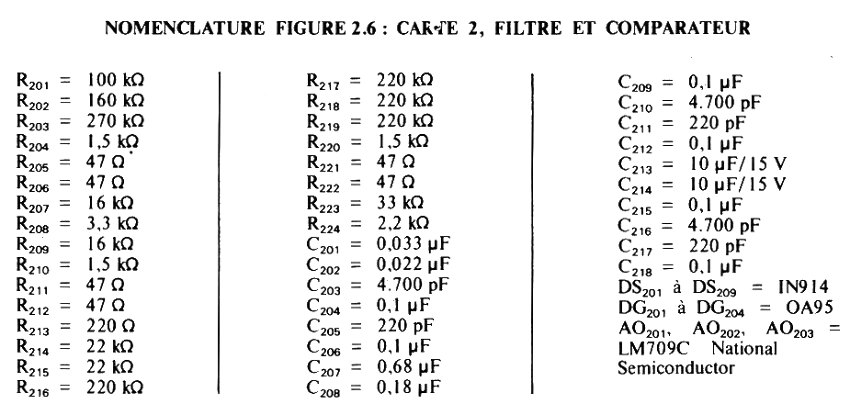
Carte n°2 : Filtre passe-bas et comparateur (fig. 2.6.). Voir pages ci-avant
Filtre passe-bas
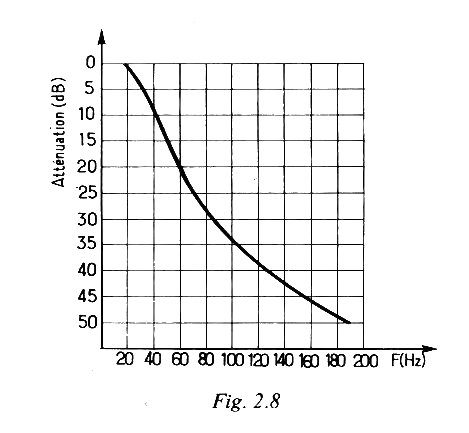
II a été défini que pour une vitesse de transmission de 45 bauds, la fréquence de coupure idéale d'un tel filtre doit être de 27Hz, c'est donc cet objectif que s'est fixé l'auteur lors de la détermination des éléments du filtre actif, préféré à un filtre classique, les avantages étant nombreux pour cette application : encombrement, répétitivité des caractéristiques, etc. La courbe relevée par l'auteur est donnée figure 2.8.
Le filtre passe-bas est suivi d'un'contrôle de seuil automatique dont nous allons analyser le fonctionnement, et pour ce faire nous nous reportons au schéma de principe de la carte n° 2. Pour un signal mark stable, on trouve en sortie de AO202 une tension continue, légèrement supérieure à 8V, nous prendrons pour simplifier exactement 8V.
Cette tension charge le condensateur C214 et il apparaît borne 11, c'est-à-dire au niveau du commutateur normal-inverse une tension de 4V puisque R2,4 et R215 forment un diviseur par 2.
Si on passe brusquement d'un signal mark à un signal space, la tension en sortie de AO202 passe elle de +8 à -8V, le condensateur C213 se charge et il apparaît borne 11 une tension de -4V. En même temps comme l'inversion est instantanée, la tension aux bornes de C214 s'ajoute à la tension en sortie de AO202 ce qui fait que sur la borne 11 on trouve -8V et non plus -4V. Nous insistons bien sur le fait que cette tension de 8V sur la borne 11 n'apparaît que pour des inversions rapides du signe de la tension en sortie de FAO202 car après un temps relativement court C214 se décharge et on revient sur la borne 11 à -4V. Pour un signal RTTY normal qui se caractérise par une alternance de signaux positifs et négatifs en sortie de AO202 on retrouvera ces signaux avec la même polarité et la même amplitude sur la borne 11. Les résistances R216-R218 d'une part et R217-R219 d'autre part sont utilisées pour diviser par deux la tension apparaissant sur les bornes 2 et 3 et limiter ainsi la différence des tensions appliquées aux entrées de AO203 à 4V environ. Par mesure de sécurité nous avons ajouté deux diodes DS206 et DS207 pour le cas où la différence des tensions dépasserait, ne serait-ce que sur une impulsion brève, les 5V qui peuvent détruire ce type d'amplificateur opérationnel.
Dans le cas du fonctionnement avec seulement des signaux mark, en sortie de AO202, la tension sera de +8V en présence d'un mark et voisine de zéro sans signal, point qui en temps normal correspondrait à un space, donc à -8V en sortie de AO202. Grâce au système utilisé, la tension sur la borne 11 ne variera pas comme on pourrait le penser entre +4V et zéro, mais entre +4V et -4V. Il y a bien variation du signal d'attaque du comparateur de part et d'autre de zéro comme dans le cas d'un signal RTTY normal. L'amplitude de part et d'autre de zéro n'a que peu d'importance puisqu'il faut seulement une fraction de millivolt pour faire changer l'état du comparateur.
Ce circuit présente un intérêt non négligeable, compte tenu du peu de composants nécessaires à sa réalisation puisqu'il permet de recevoir des signaux n'utilisant qu'une seule fréquence de modulation et de « récupérer » certaines lettres qui seraient affectées par des conditions de réception défavorables.
Comparateur
Le comparateur est composé simplement d'un amplificateur opérationnel (AO203) non bouclé qui changera d'état comme nous l'avons indiqué précédemment pour de très faibles variations de la tension d'entrée autour de zéro. La tension en sortie sera toujours de l'ordre de 11V (tension de saturation de l'amplificateur en positif ou en négatif), et assurera la conduction ou le blocage du transistor haute tension utilisé pour commander l'électro-aimant de la machine.
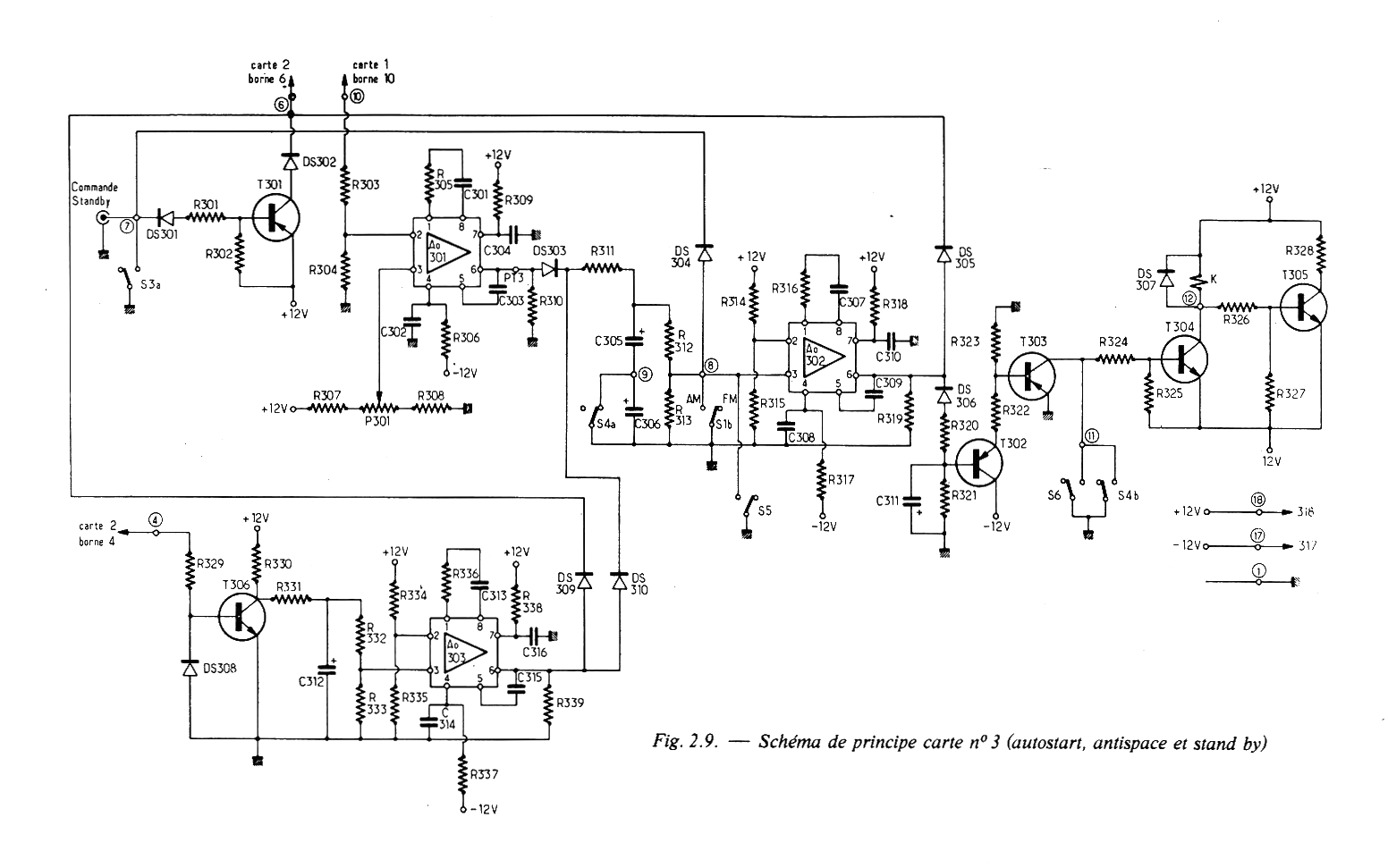
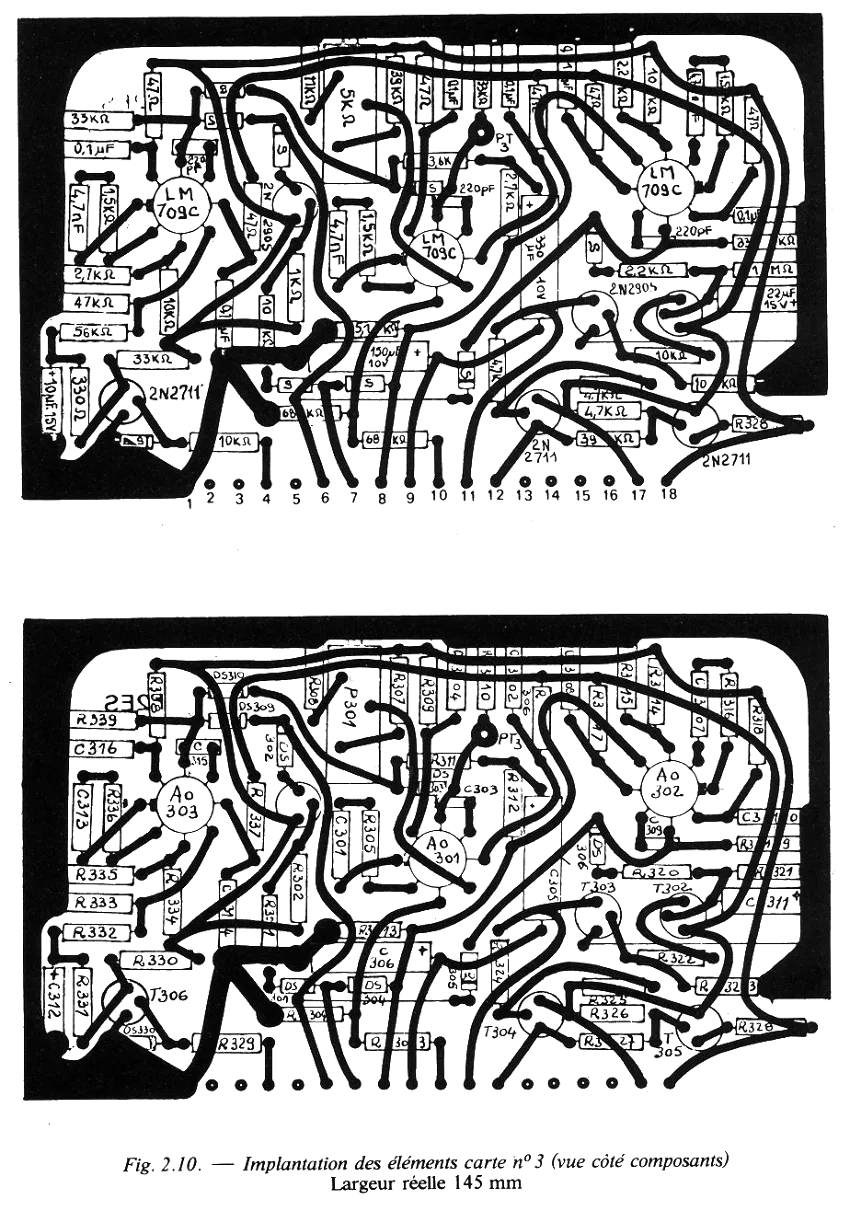
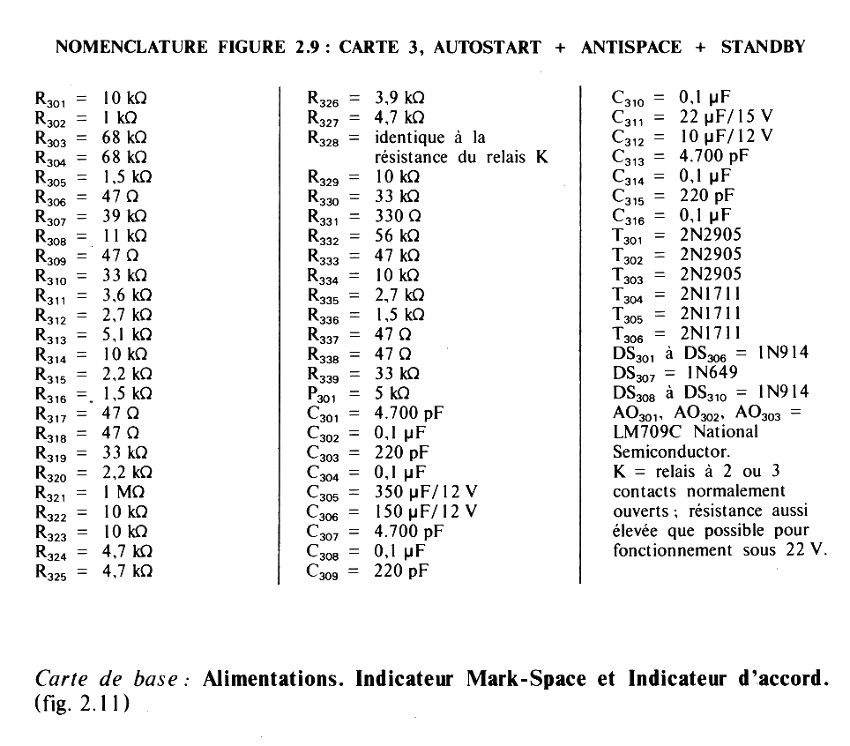
Carte n°3 : Autostart, Antispace et Standby (fig. 2.9)
Antispace
Ce système, comme nous l'avons indiqué brièvement est utilisé pour éviter l'impression de caractères en l'absence de vrais signaux RTTY. Au repos, on reçoit un signal mark, ce qui place la sortie de l'étage comparateur en saturation positive, le transistor haute tension T403 est donc conducteur. Sur la carte 3 on applique directement la tension de sortie du comparateur sur la base de T306 ; celui-ci est donc conducteur et de ce fait le condensateur C312 ne peut pas se charger. Sur l'entrée non-inverting de AO303 la tension est très proche de zéro alors que sur l'entrée inverting on applique une tension fixe de 2,5V environ, et en sortie de AO303 la tension est de -11V ; donc DS309 et DS310 ne conduisent pas, ce circuit n'agit pas sur les autres étages.
La transmission d'un caractère RTTY nécessite un temps de 132ms si l'on compte l'impulsion de départ, et à la limite on peut avoir un signal space de 132ms qu'il faut recevoir normalement, ensuite si la transmission est correcte, on doit revenir en position mark pendant au moins 31ms, ce qui correspond à l'impulsion de fin de caractère. Ainsi donc, si pendant plus de 132ms on enregistre un signal space, c'est que la réception n'est pas correcte pour une raison quelconque et on peut imprimer des caractères inexacts et dérouler du papier sans que cela soit nécessaire. Le système antispace qui est monté dans le ST6 a pour but de faire conduire le transistor haute tension, donc de revenir en position mark si la tension en sortie du comparateur reste négative pendant plus de 150ms au moins.
Lors de la transmission normale d'un caractère, le passage de la saturation positive à la saturation négative du comparateur entraîne la conduction et le blocage de T306, donc la décharge et la charge de C312. Si le transistor T306 se bloque pendant un temps supérieur à 200ms environ avec les valeurs indiquées, l'entrée non-inverting est portée à un potentiel positif supérieur à celui de l'entrée inverting, donc l'amplificateur AO303 bascule en saturation positive. Cette tension est appliquée, à l'aide de DS309 sur la base du transistor haute tension T403 qui conduit instantanément ce qui excite l'électro-aimant. Par ailleurs à l'aide de DS310 on commence à charger C305 et C306 ou C305 seul si S48 est fermé. Il faut alors environ 1 seconde pour que l'entrée non-inverting de AO302 soit portée à un potentiel positif supérieur à celui de l'entrée inverting, donc que cet amplificateur passe en saturation positive dans le cas où S1b et S5 sont ouverts. Le condensateur C311 qui était chargé en négatif commence à se décharger à travers R32, et si le signal space reste pendant plus d'une vingtaine de secondes, les transistors T302, T303 et T304 vont se bloquer, donc les contacts du relais K vont s'ouvrir coupant ainsi l'alimentation du moteur. Attention, ceci n'est valable évidemment que si S4b et S6 sont ouverts.
Il n'a pas été prévu la possibilité de mettre hors service le système antispace, mais ceci peut être réalisé simplement en ramenant le collecteur de T306 à la masse éventuellement à l'aide d'un interrupteur supplémentaire.
A noter que dans ce circuit, la diode DS308 est utilisée pour protéger la jonction base-émetteur du transistor Tgoe en inverse lorsque la sortie du comparateur est à -11V ; la résistance R331 de faible valeur est prévue pour limiter le courant de décharge du condensateur C312. Il n'a pas été prévu de diodes de limitation en parallèle sur les entrées de AO303, la tension maximale qu'il est possible de trouver sur l'entrée non-inverting se situe en effet aux environs de +4,5V alors que l'entrée non-inverting est à un potentiel fixe de 2,5V.
Ce circuit est prévu pour éviter le fonctionnement du moteur en l'absence de signaux RTTY ; il permet donc de laisser l'ensemble de réception sous tension 24 heures sur 24 sur une fréquence déterminée, de mettre le moteur en marche dès qu'apparaît un signal RTTY et de l'arrêter si le signal disparaît pendant une vingtaine de secondes. Si un message RTTY est transmis ou si un signal mark stable apparaît, le moteur se met automatiquement en route ; si par contre c'est un signal space stable qui apparaît, le système antispace entre en action et le moteur reste à l'arrêt. Il faut cependant prendre quelques précautions avec ce genre de circuit car on pourrait avoir des cas de fonctionnement qui seraient assez pénibles pour la machine ou risqueraient d'amener des erreurs de réception. Ainsi, dans le cas où les réactions du circuit seraient instantanées, on pourrait donner l'ordre de mise en route sur un parasite et quelques millisecondes plus tard l'ordre d'arrêt. D'un autre côté en cours de message, l'apparition de fading par exemple devrait donner l'ordre d'arrêt instantané du moteur, ce qui n'est absolument pas nécessaire.
Si l'on ne tient pas compte du circuit antispace, la commande du système de démarrage automatique se fait par la tension en sortie des circuits accordés du discriminateur, tension qui varie entre 0 et 7,5V environ selon que l'entrée du convertisseur est en l'air ou qu'un signal mark ou space lui est appliqué.
Supposons donc qu'un message vienne d'être reçu ; à la fin de celui-ci la porteuse ou la modulation disparaît, on ne reçoit donc plus que le souffle du récepteur ; le moteur est toujours en marche. Toutefois la tension en sortie des circuits accordés du discriminateur descend à une valeur nettement inférieure à celle qui existait en présence des signaux RTTY. Le potentiel fixe de l'entrée non-inverting. devient donc supérieur à celui variable de l'entrée non-inverting de l'amplificateur AO301 et celui-ci bascule en saturation positive. La diode DS303 conduit et permet la charge du condensateur C305. La tension sur l'entrée non-inverting de AO302 atteint celle existant sur l'entrée inverting au bout d'une seconde environ et l'amplificateur bascule alors en saturation positive. Ceci a pour effet de bloquer DS306 autorisant ainsi la décharge du condensateur C311 à travers la résistance R321, et de permettre la conduction de DS305 donc par voie de conséquence de faire conduire le transistor T403 qui commande l'électro-aimant plaçant ainsi le circuit haute tension dans une position d'attente qui correspond à un signal mark continu. Il serait envisageable d'utiliser un contact du relais K. pour mettre hors service l'alimentation de l'électro-aimant en même temps que le moteur est mis à l'arrêt, ce qui éviterait une consommation de l'ordre de 10W dans la ou les résistances de régulation et l'augmentation de la température dans le boîtier. Ce n'est pas indispensable mais par ailleurs, il n'est absolument pas utile de consommer cette puissance quand la machine est à l'arrêt.
Prenons le problème dans l'autre sens en considérant l'ensemble à l'arrêt, aucun signal n'arrivant sur l'entrée du convertisseur. Puis un signal RTTY apparaît, la tension au point test 2 monte à +7,5V environ et l'entrée inverting de AO301 est portée à +3,8V par le diviseur R303-R304. L'entrée non-inverting de ce même amplificateur opérationnel est, elle, portée à un potentiel fixe ajustable par le potentiomètre P301 entre +2,5V et +3,5V, donc inférieur à celui de l'entrée inverting, ce qui entraîne le basculement en saturation négative de AO301, le blocage de la diode DS303 et si l'on fait abstraction du circuit antispace, le condensateur C305 se décharge à travers R312 et R313. Le potentiel de l'entrée non-inverting de AO302 diminue donc et dès qu'il devient inférieur à celui de l'entrée inverting (2,2V environ), l'amplificateur opérationnel bascule en saturation négative, la diode DS305 se bloque, mais la conduction de DS306 autorise la charge du condensateur C311 à travers la résistance de limitation R320.
Les transistors T302, T303 et T304 conduisent presque instantanément, le relais K s'excite, le moteur de la machine est mis en route et si ce dispositif a été prévu, la tension d'alimentation peut être à nouveau appliquée à l'électro-aimant.
Une modification pourrait être apportée au circuit du relais pour être certain du fonctionnement du moteur en cas de panne du circuit autostart. Il suffit de permuter R328 et la bobine du relais K qui sera excitée seulement quand le moteur est à l'arrêt, mais il faudra alors disposer de contacts normalement fermés et non plus normalement ouverts. On notera que la résistance R328 et le transistor T305 sont utilisés uniquement pour équilibrer la charge sur l'alimentation basse tension au moment de la commutation marche-arrêt du moteur. Ce dispositif est utile dans le cas d'une alimentation mal régulée, mais nous ne pensons pas que ce soit indispensable avec la régulation prévue ici, si la consommation du.relais lui-même n'est pas trop importante. Toutefois comme nous disposions de matériel et de place sur le circuit imprimé, nous l'avons prévue dans notre réalisation ; chacun peut faire comme bon lui semble.
Pour certains cas de trafic il a été prévu de diminuer le temps de fonctionnement du circuit autostart à l'aide de l'interrupteur S4 qui connecte en série avec le condensateur C305, le condensateur C306 tel que la capacité équivalente est sensiblement égale au quart de celle de C305, le temps de fonctionnement diminuant dans la même proportion. Dans ce cas le moteur est laissé sous tension en permanence puisque quand S4a est ouvert S4b est fermé, donc le transistor T304 est excité quel que soit l'état de AO302, donc de T302 et T303.
Standby
Ce circuit est utilisé, comme son nom l'indique, pour mettre le convertisseur en standby manuellement par un interrupteur situé sur la face avant de l'appareil, ou par un automatisme quelconque qui sera raccordé sur une sortie prévue à l'arrière. Dès que, d'une manière ou d'une autre, on met le convertisseur en standby, le transistor haute tension est. porté à l'état de conduction puisque T301 devient lui-même conducteur, et le moteur est maintenu en marche car l'entrée non-inverting de AO302 est ramenée à la masse par la diode DS304, ce qui bloque cet amplificateur opérationnel en saturation négative et entraîne la conduction permanente de T302, T303 et T304.
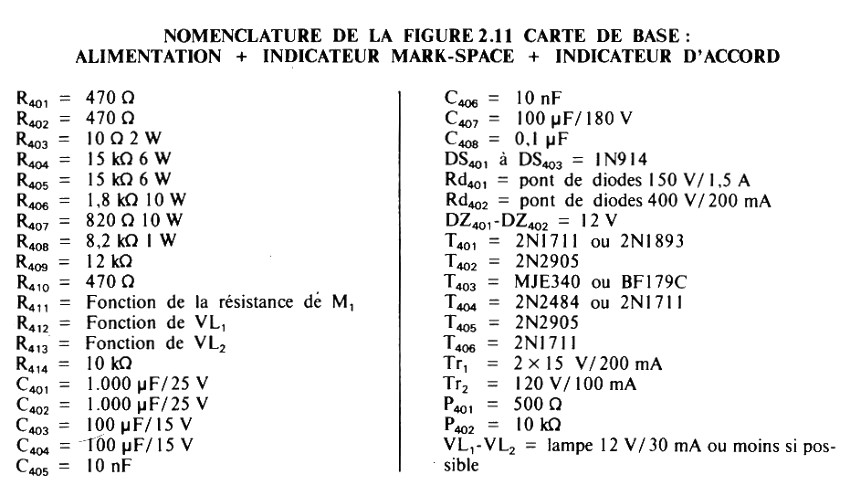
Carte de base : Alimentations. Indicateur Mark-Space et Indicateur d'accord (fig. 2.11).
Alimentation haute tension
Comme les circuits dont nous parlerons ensuite, l'alimentation haute tension est située sur la carte de base, sauf le transformateur qui, lui, est monté dans le boîtier. L'alimentation fournit une tension continue de l'ordre de 180V, la consommation de l'électro-aimant pouvant être de 60mA maximum et la limitation étant effectuée par la résistance de 1,8 kohms 10W. Certains téléimprimeurs ont un électro-aimant nécessitant un courant de l'ordre de 30 à 40 mA, dans ce cas-là, on ajoute la résistance R407 de 820ohms en série avec R406 et la bobine de l'électro-aimant.
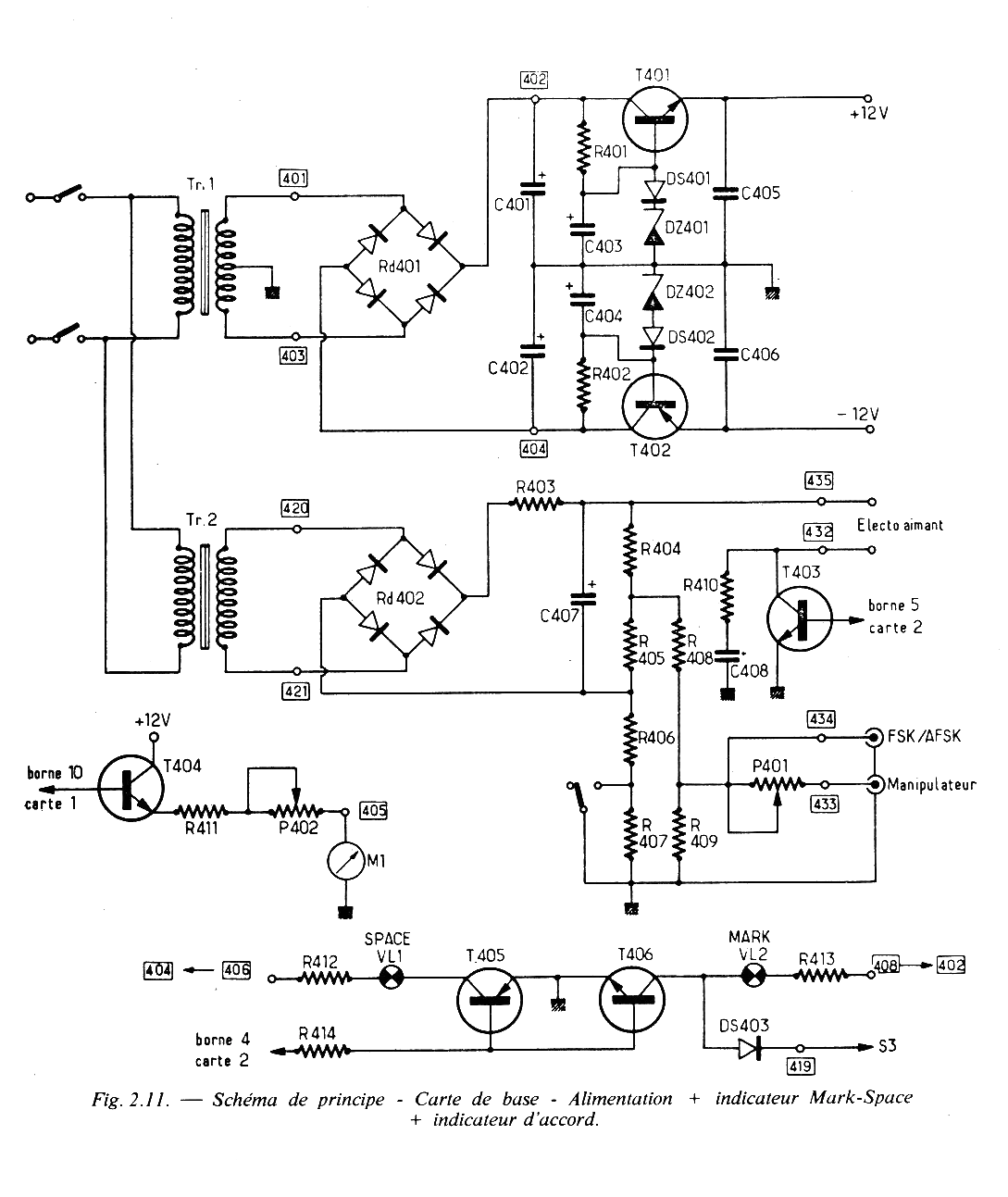
En plus, on dispose d'une sortie pour commander le modulateur FSK ou AFSK de l'émetteur, et d'une sortie pour un manipulateur destiné à l'identification CW en fin de message, identification qui se fait normalement avec un shift faible. En sortie FSK/AFSK on trouve une tension soit positive soit négative suivant que l'électro-aimant est excité ou non.
Le transistor haute tension T403 est protégé contre les surtensions par un circuit RC monté entre collecteur et émetteur, ce qui limite la tension collecteur-émetteur au moment de la décharge de la self de l'électro-aimant.
Alimentation basse tension
Les amplificateurs opérationnels du type 709 nécessitent deux tensions d'alimentation, que l'on choisit généralement égales à +12V et -12V, ce qui est une tension standard, mais en fait leur fonctionnement est correct entre 10V et 18V, cette dernière valeur ne devant pas être dépassée sous peine de destruction de l'amplificateur, une tension de 12volts est donc une valeur raisonnable.
La régulation est assurée par une diode Zener et un transistor, la tension de référence appliquée à la base du ballast étant la tension Zener plus la tension directe d'une diode silicium, soit 0,7V environ, ce qui compense la perte due à la tension base-émetteur du transistor ballast. Il est important de se trouver largement au-delà du coude de la diode Zener (il faut i zener > 10 ou 15 mA selon les cas) pour que la tension soit bien régulée même avec des variations de la tension secteur de ±10%. Par ailleurs s'assurer que la tension non régulée est toujours supérieure à 15V pour que la tension collecteur reste supérieure à la tension'émetteur, mais également qu'avec un réseau à +10 % la tension collecteur-émetteur n'est pas trop élevée car la puissance à dissiper par le ballast peut dépasser sa valeur nominale, et on risque d'avoir besoin d'un radiateur.
Indicateur d'accord
L'indicateur d'accord que nous avons utilisé est le même que celui prévu pour le ST5, il n'appelle pas de commentaire particulier, il faudra que chacun détermine tout d'abord la résistance du milliampèremètre et ensuite les composants à placer en série avec lui pour obtenir une déviation totale avec une tension de 10 à 11V sur la base et tenant compte du fait que la tension base émetteur du transistor sera de 0,6 à 0,7V.
Indicateur mark-space
La tension utilisée pour commander ce circuit est prélevée directement en sortie du comparateur, elle sera donc positive pour un mark et négative pour un space. Le transistor T406 conduira donc sur les mark allumant VL2, et le transistor T405 conduira sur les space allumant VL1. A noter que le décodeur mis en standby, la lampe mark s'allume quel que soit le signal appliqué à l'entrée ; aussi les deux lampes peuvent être allumées en même temps. Ceci peut rappeler, en cas d'oubli que le convertisseur est en position standby.
On remarquera que les voyants lumineux sont alimentés à partir des tensions continues non régulées afin de ne pas augmenter la puissance à dissiper dans les transistors ballast.
Les commutateurs et leurs fonctions
S1 = Double inverseur pour la commutation AM/FM. En position AM, S1a limite le gain de AO101 mise en circuit de R104 et S1b ramène l'entrée 3 de AO302 à la masse ce qui maintient le moteur en fonctionnement. En position FM, S1a ramène R104 à la masse.
S2 = Double inverseur pour la commutation normal-inverse, dans le cas d'inversion mark/space.
S3 = Simple inverseur pour la mise en standby du convertisseur. Le comparateur AO203 est placé automatiquement en position mark et le moteur est mis et maintenu en fonctionnement.
S4 = Commutation lent-rapide du circuit autostart ; en position rapide le moteur est mis et maintenu en fonctionnement.
S5 = Mise hors service du circuit autostart.
S6 = Mise en marche du moteur quelle que soit la position des autres commutateurs.
S7 = Commutateur 170Hz/850Hz, 4 circuits, 2 positions.
Mise en service du convertisseur
Après câblage, jeter quand même un coup d'oeil rapide pour s'assurer que toutes les soudures ont été faites (et bien faites) car à force de souder il est très facile d'oublier une pastille.
En cas d'utilisation de circuits imprimés embrochables, déconnecter les cartes 1 et 2 et 3 ou, en cas de liaison par fils, débrancher les fils venant de l'alimentation basse tension et vérifier en sortie de celle-ci que l'on dispose bien par rapport à la masse d'une tension +12V et d'une tension -12V. Vérifier également l'alimentation haute tension: 180V environ. Couper l'alimentation générale et mettre les cartes en place ou ressouder les fils de liaison.
Vérifier, toutes les cartes étant alimentées, la valeur des deux tensions 12V afin de s'assurer que la régulation est correcte. Si tout est alors en ordre on peut passer aux réglages des différents circuits.
Déconnecter l'entrée basse fréquence, brancher un voltmètre d'impédance raisonnable entre la masse et le point test 1 et jouer sur le réglage du potentiomètre P101 jusqu'à ce qu'une lecture aussi proche que possible de zéro soit obtenue. Attention, mettre S1 en position FM et tourner le potentiomètre très lentement, les variations de tension en sortie de AO101 étant très brutales en raison du gain de cet amplificateur.
Brancher maintenant le voltmètre entre la masse et le point test 2 ou, s'il est monté, utiliser l'indicateur d'accord. Appliquer à l'entrée successivement un signal mark et un signal space, et jouer sur le potentiomètre P102 jusqu'à ce que les tensions soient identiques pour l'un et l'autre signal (ou la déviation de l'indicateur d'accord). Ceci équilibre le discriminateur et sera fait pour le shift de 850Hz qui est le plus courant.
Pour le cas où l'indicateur d'accord a été monté, appliquer maintenant un signal mark à l'entrée du convertisseur et ajuster le potentiomètre P402 afin d'obtenir une déviation du milliampèremètre correspondant à 70% environ de la pleine échelle. Jouer doucement sur le réglage de la fréquence du signal d'entrée pour ramener l'aiguille du milliampèremètre à 60% de la pleine échelle et brancher un voltmètre entre la masse et le point test 3 (sortie de AO301). La tension mesurée peut être positive ou négative : il faudra alors ajuster le potentiomètre P301 pour que la tension soit en limite de basculement positif/négatif. Ceci a pour but de régler la sensibilité du système autostart. Si les shift 170Hz et 850Hz ont été prévus, ce réglage sera effectué pour 170Hz, le 850Hz étant moins critique.
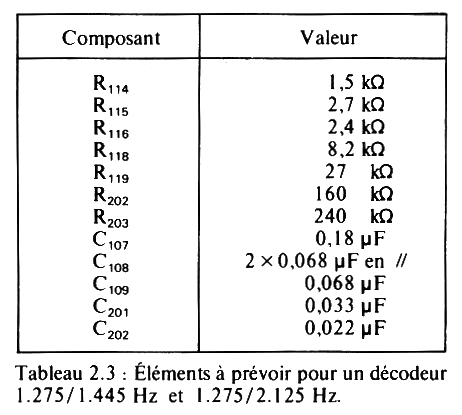
En cas de mauvais fonctionnement de ces circuits, on peut procéder de la manière suivante au moins pour une première recherche de défaut ; nous verrons plus loin les tensions que l'on doit trouver en différents points de l'ensemble.
Appliquer un signal mark à l'entrée du convertisseur. Au point test 2 la tension doit être comprise entre 7 et 9V. Sur l'anode de DG201 on doit retrouver une tension également comprise entre 7 et 9V, et si ce n'est pas le cas (plus de 9V ou moins de 7V) on changera R202 pour obtenir 9V en ce point, sans toutefois dépasser cette valeur. On choisira ensuite la valeur de C201 dans le tableau 2.1 qui correspond à la valeur de R202 nécessaire. Si toutes ces conditions sont respectées la tension en sortie de AO203 doit être de l'ordre de 11V et le moteur doit être en marche au plus 4 ou 5 secondes après que le signal mark a été appliqué.
Si ce n'est pas le cas, il faut chercher plus loin et vérifier avec les explications que nous avons données lors de la description des différents étages que tout est en ordre. On peut également se reporter au tableau 2.2 et comparer les tensions mesurées avec celles indiquées en admettant quelques variations mais généralement très faibles, compte étant tenu que les valeurs relevées l'ont été avec un voltmètre ayant une impédance d'entrée de 10Mohms.
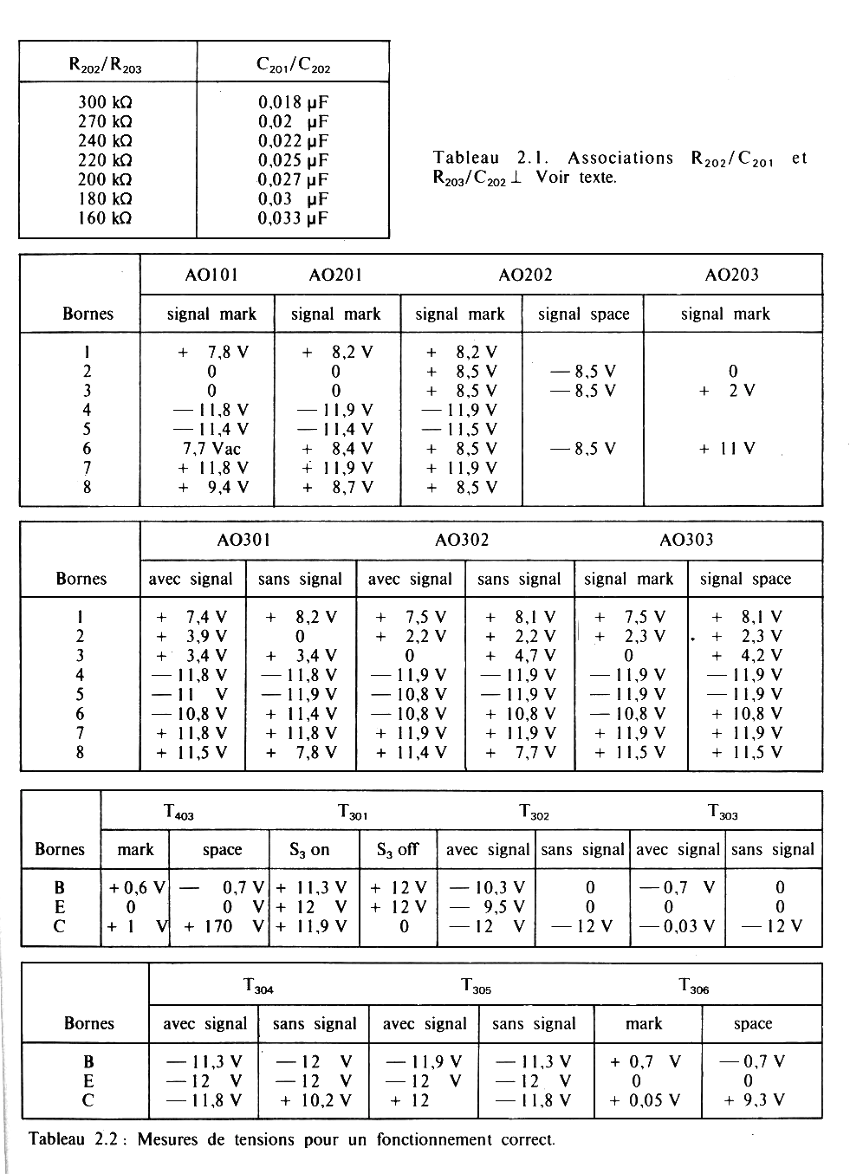
Remarque
Certains récepteurs SSB utilisent un filtre 2.400Hz et se trouvent ainsi limités à 300-2.400Hz. De ce fait les signaux 2.975Hz ne peuvent être reçus, ce qui incite certains amateurs à fonctionner sur des fréquences de modulation plus basses qui sont 1.275/1.445Hz pour un shift de 170Hz et 1.275/2.125Hz pour un shift de 850Hz. Nous reproduisons dans le tableau 2.3 les valeurs qui ont été déterminées à l'origine pour ce cas particulier.
Il est néanmoins préférable sur la majorité de ces récepteurs de changer la fréquence du BFO à l'aide d'un quartz différent qui permettra d'obtenir une plage BF de 1.400-3.500Hz.
Conclusion
Cet appareil n'est certes pas le dernier cri en la matière mais nous pensons qu'il s'agit d'un excellent outil pour la réception des émissions RTTY, et nous ne pouvons qu'encourager nos lecteurs à le réaliser ; il restera moderne encore longtemps très probablement.
CONVERTISSEUR RTTY PL2
L'apparition des circuits intégrés « Phase Lock Loop » ou PLL a permis de réaliser des convertisseurs RTTY dont les performances sont sensiblement supérieures à ceux que nous avons décrits dans les pages précédentes. Sans les circuits intégrés, ce système n'aurait pas été réalisable d'une façon simple pour l'amateur, le nombre de composants étant élevé, mais l'intégration de la majorité des éléments nécessaires dans un seul boîtier rend maintenant la chose possible à un prix raisonnable.
Les avantages de ce genre de circuit pour un convertisseur RTTY sont nombreux :
ils ne nécessitent pas l'utilisation des selfs de 88mH, l'indicateur d'accord éventuel n'a plus de raison d'exister et la dimension des circuits est réduite dans des proportions importantes. De même pour le convertisseur que nous décrivons ci-dessous, il est possible d'obtenir très simplement les deux caractéristiques suivantes :
- sélection automatique du « shift » ou variation de fréquence entre 150 et 1.000Hz;
- contrôle automatique de fréquence sur une plage de ±500Hz.
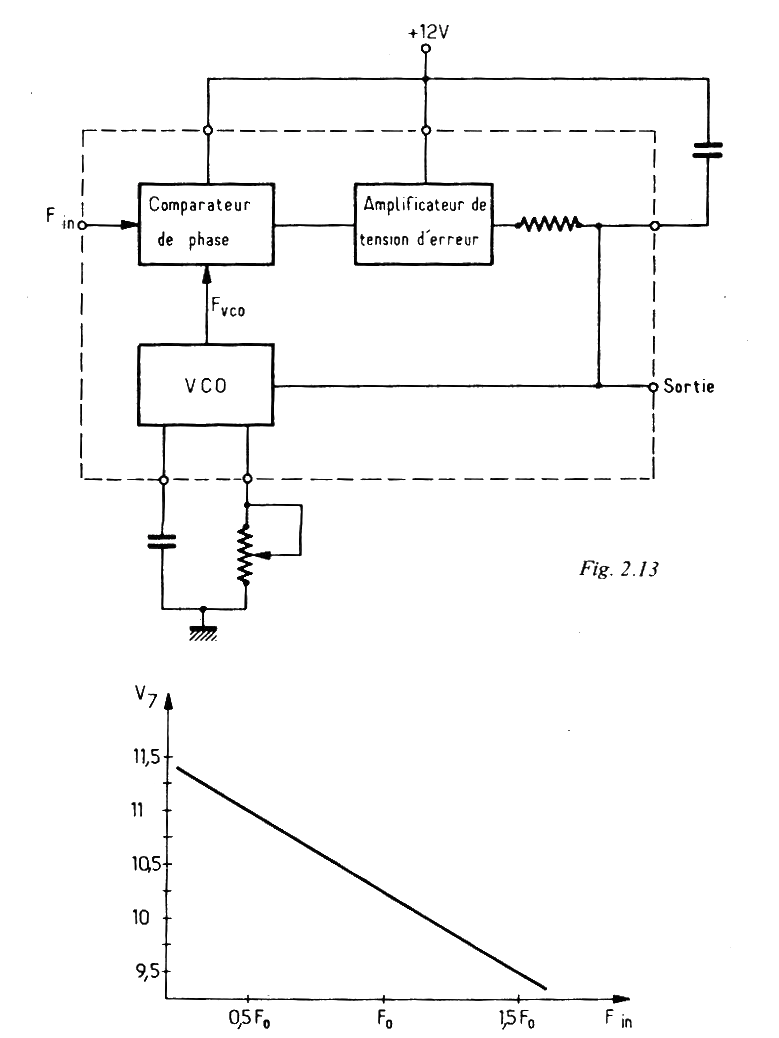
Le circuit PLL possède un oscillateur contrôlé par une tension (VCO) qui est d'une excellente linéarité, et sa fréquence est réglée sur la valeur moyenne des deux fréquences extrêmes, ceci apparaissant clairement sur la figure 2.13. La fréquence de référence ou fréquence centrale du VCO est déterminée à l'aide d'un simple circuit RC, et elle est comparée en valeur et en phase au signal d'entrée qui est appliqué au comparateur de phase. S'il existe une différence entre les valeurs de Fin et Fvco, il apparaît en sortie du comparateur de phase une tension d'erreur qui est amplifiée, filtrée et appliquée à l'entrée de contrôle du VCO. Cette tension d'erreur entraîne une variation de la fréquence du VCO, qui se trouve ramenée à une valeur identique à celle de Fin. La tension d'erreur se trouve ainsi annulée et le circuit reste bloqué dans cette position.
Si la fréquence d'entrée Fin varie dans les limites de la gamme couverte par le VCO, la tension d'erreur correspond à la modulation en fréquence de Fin et il est possible de considérer que le résultat est identique à celui obtenu en sortie du filtre LC du ST5 ou du ST6. En faisant suivre ce circuit d'un comparateur LM709 ou LM741 on revient exactement au ST5 mais avec de meilleures performances.
Ainsi le circuit NE565K délivre une tension d'erreur de 100 mV environ pour une variation de fréquence de 200Hz, ce qui implique qu'entre 170Hz et 850Hz qui sont les deux fréquences extrêmes du shift standard il ne sera pas nécessaire de modifier quoi que ce soit au circuit pour obtenir un décodage correct.
Afin d'éliminer la fréquence du VCO qui apparaît sur la sortie du NE565 il est nécessaire d'utiliser un filtre, mais comme on le voit sur la figure 2.14, celui-ci n'a rien de comparable avec les filtres du ST6.
Un défaut cependant reste à éliminer avec ce circuit, c'est celui qui apparaît lorsque le signal transmis ou le récepteur dérive, car dans ces conditions, la sortie du comparateur devient dissymétrique et on obtient un signal toujours positif ou toujours négatif suivant le sens dans lequel se produit la dérive.
La solution semble simple puisqu'il suffit que la tension de référence varie proportionnellement à la dérive du signal transmis ou du récepteur pour que la sortie du comparateur reste symétrique. En intégrant des variations de la tension d'erreur, on obtient une tension de référence qui varie en fonction des valeurs extrêmes de la tension d'erreur, mais ceci doit être obtenu sans perturber le fonctionnement du circuit. Le circuit de la figure 2.15 permet d'atteindre l'objectif fixé puisque la tension de référence est une valeur moyenne de la tension d'erreur, et varie pour un décalage entre les signaux d'entrée et du VCO, comme pour une dérive du récepteur.
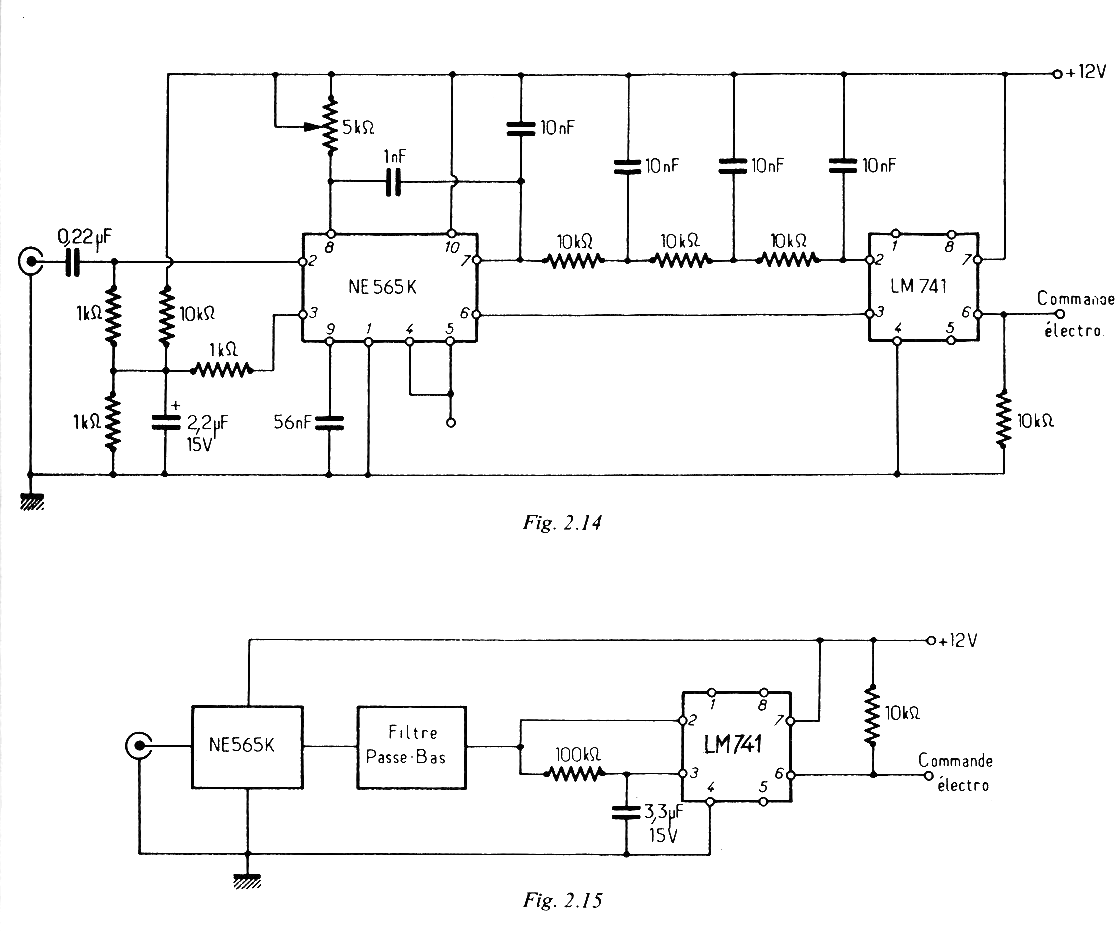
La constante du circuit RC a été choisie 15 fois supérieure à celle d'une impulsion, soit dans le cas standard, 22 ms x 15 = 330ms, de telle sorte que le signal de référence suit les variations de tension d'erreur avec un retard de 3 caractères RTTY standard.
La résistance de 100 kohms déséquilibre le comparateur de telle sorte que sa sortie reste en position mark en l'absence d'un signal à l'entrée de l'appareil.
Le circuit de la figure 2.15 fonctionne pour des défauts d'accord restant dans une gamme correspondant environ à ±50% de la fréquence centrale du VCO.
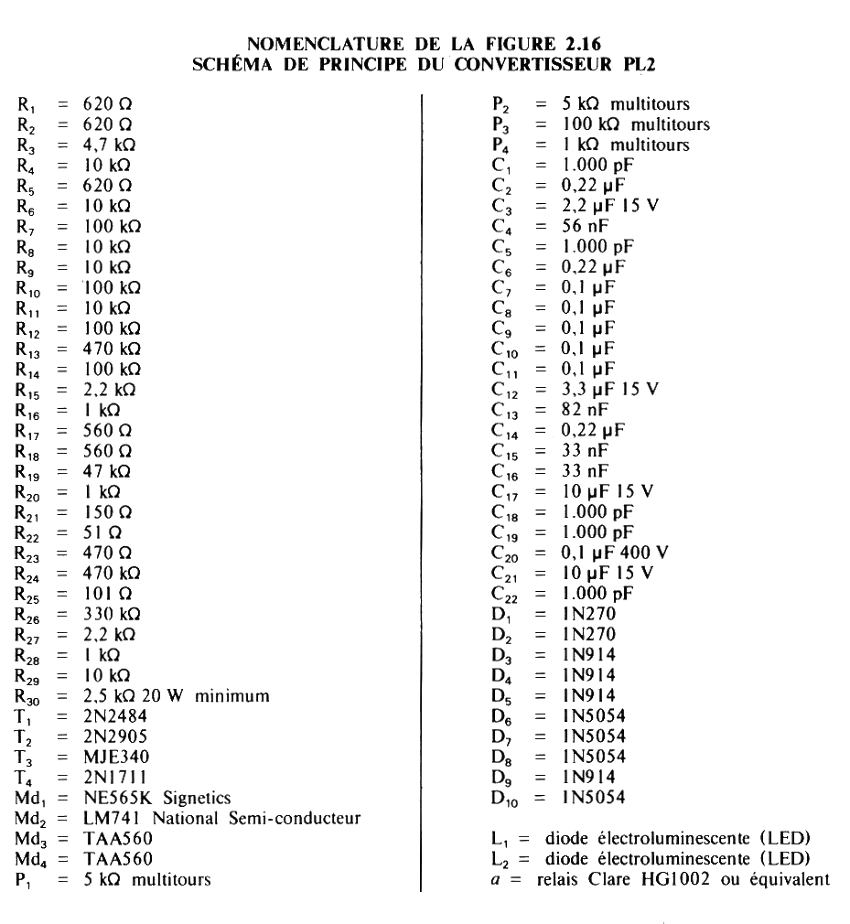
Reportons-nous maintenant au schéma de principe de la figure 2.16.
En ce qui concerne le circuit d'entrée, son impédance est de 600 ohms, et il possède une protection contre les surcharges réalisée simplement avec deux diodes montées tête-bêche ce qui limite la tension appliquée au circuit à 0,6V environ.
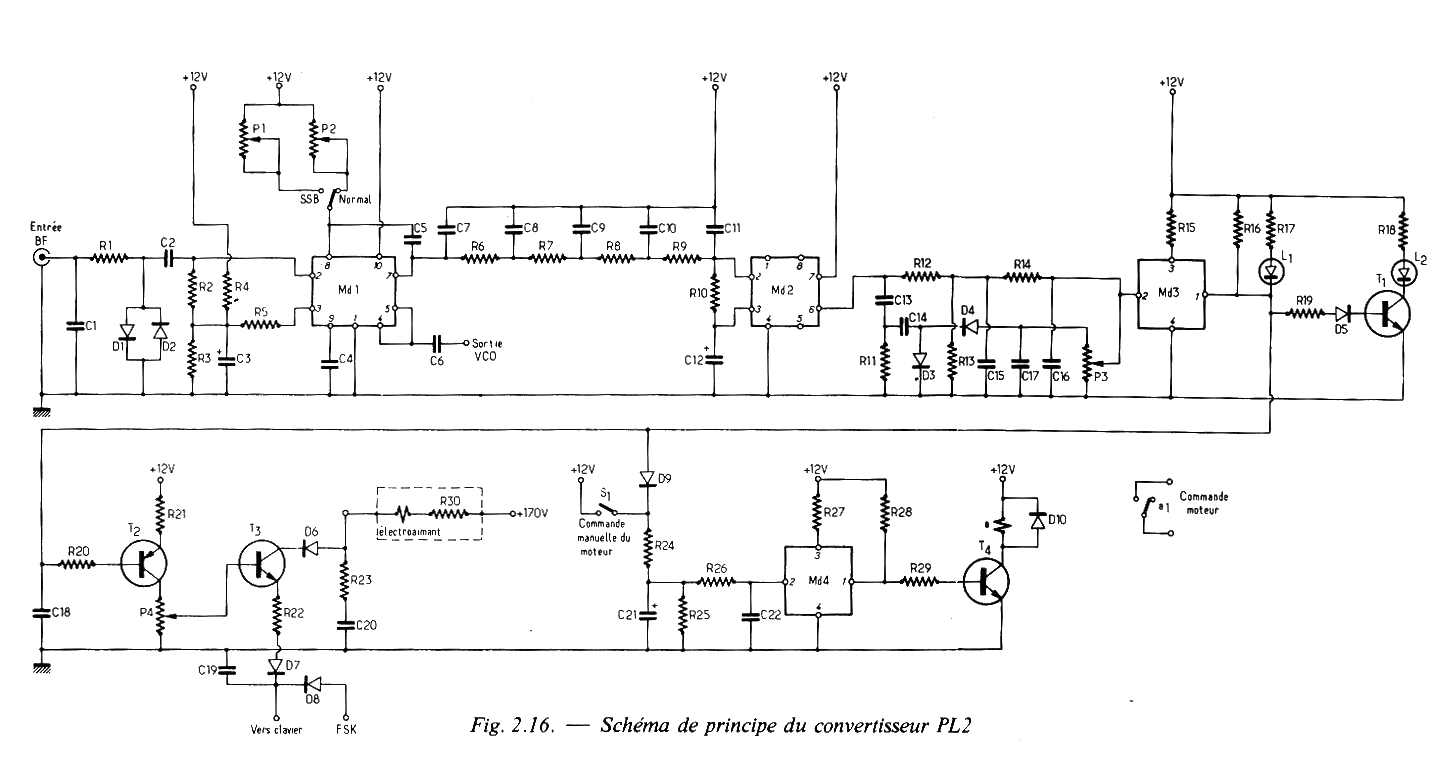
Un fonctionnement normal est garanti pour des signaux de 100mV crête-crête ce qui se révèle très largement suffisant.
Afin d'éviter un fonctionnement du téléimprimeur en l'absence de signaux RTTY normaux un circuit squelch a été ajouté dans le but de bloquer la sortie en position mark.
Cette fonction est réalisée à l'aide d'un circuit intégré type TAA560, et le niveau de blocage peut être réglé à l'aide du potentiomètre de 100 kohms pour que le téléimprimeur s'arrête de fonctionner lorsque seul le souffle du récepteur est appliqué à l'entrée.
La commande de l'électro-aimant s'effectue au moyen de deux transistors et à courant constant ajustable aux environs de 60mA.
Le premier transistor est utilisé pour obtenir une tension de référence fixe pour un signal mark aux bornes du potentiomètres P4, qui, lui, est relié à la base du transistor T3. Sur l'émetteur de ce transistor, donc aux bornes de R22, lorsque le clavier réunit cette résistance à la masse, ou trouve une tension qui a pour valeur celle existant sur le curseur de P4 diminuée de 1,2V environ (tension base émetteur de T3 + tension aux bornes de D7). La valeur ainsi obtenue divisée par R22 donne à peu de chose près la valeur du courant collecteur. Afin de ne pas avoir à dissiper une puissance trop importante dans T3 qui verrait de l'ordre de 150V à ses bornes, on ajoute en série avec la bobine de l'électro-aimant une résistance de puissance, R30 qui devra dissiper dans notre cas 2,5 x 10^3 x 36 x 10^-4 = 9W. Attention toutefois de ne pas choisir une résistance de trop faible puissance car la température en surface est très élevée à la valeur nominale.
Enfin il a été prévu un circuit de commande automatique ou manuelle du moteur, en passant par un circuit intégré Md4 et un relais. Les signaux en sortie de Md3 chargent le condensateur C21 et lorsque la tension reste à un niveau suffisant à l'entrée de Md4 on commande le démarrage du moteur. En l'absence de signaux, si l'on souhaite faire fonctionner le moteur, il suffit de fermer l'interrupteur S1 qui applique le 12V continu sur C21.
En ce qui concerne les alimentations, pour la haute tension, on s'inspirera de celle utilisée dans le ST6 et pour la basse tension il sera nécessaire d'obtenir une régulation aussi bonne que possible et pour cela d'utiliser un régulateur intégré par exemple un LM723.
Pour les essais, on effectuera les différents raccordements, secteur, clavier, électro-aimant, et on s'assurera que l'oscillateur fonctionne. Ensuite à l'aide d'un fréquencemètre branché en 4 de Md1, on réglera les potentiomètres P1 et P2 pour lire les fréquences suivantes: 1.500Hz en position SSB et 2.500Hz en position normale.
On raccordera alors la BF du récepteur à l'entrée du convertisseur, le récepteur sera réglé sur une fréquence libre, et on ajustera le potentiomètre P3 pour obtenir l'arrêt du moteur.
Ensuite on réglera la tension entre la masse et l'émetteur de T3 à 3,7V environ en jouant sur P4 ce qui correspondra à 60 mA dans l'électro-aimant. Il ne reste plus qu'à chercher une station transmettant en RTTY et s'assurer que tout fonctionne correctement.
CHAPITRE 3
INDICATEURS D'ACCORD
Pour bien décoder les signaux d'une station RTTY, il est nécessaire de parvenir à un calage très précis du récepteur sur la fréquence du correspondant. Il existe pour ce faire plusieurs systèmes électroniques plus ou moins complexes mais évidemment plus ou moins précis, parmi lesquels on peut citer l'indicateur à zéro central, l'indicateur à œil magique et plusieurs systèmes avec visualisation sur tube d'oscilloscope. Chacun peut évidemment avoir ses préférences en ce domaine mais il semble toutefois que la visualisation sur tube d'oscilloscope soit la meilleure, et puisqu'il existe plusieurs variantes, celle que les Américains appellent « cross pattern » apparaît comme la plus attirante ; nous y reviendrons longuement.
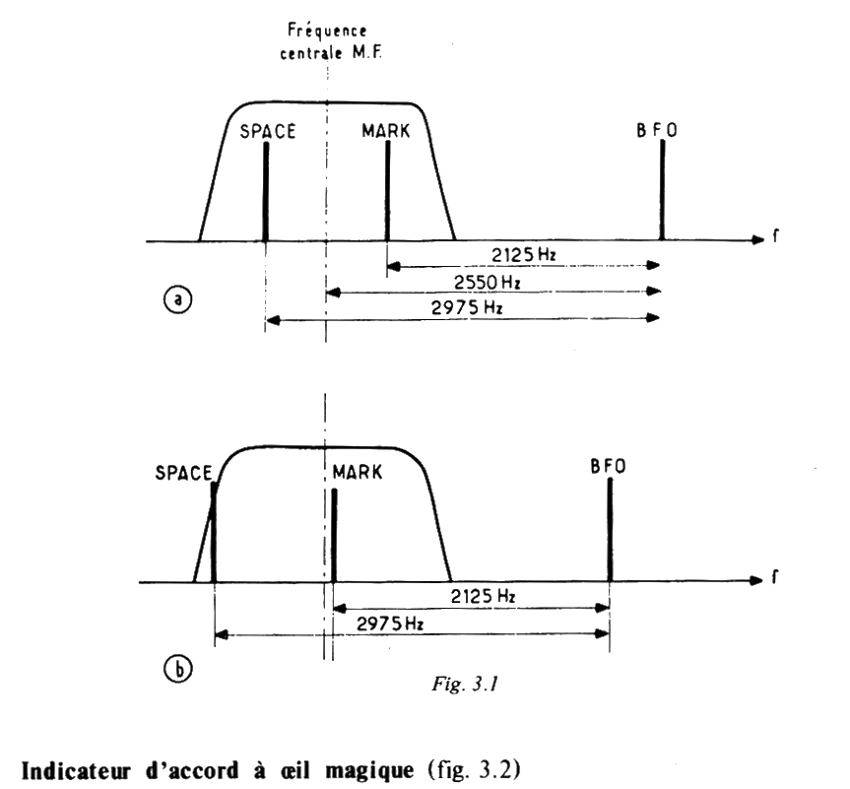
Dans le cas d'une station fonctionnant en « Frequency Shift Keying », il est nécessaire à la réception de recréer les deux fréquences correspondant aux mark et space. Pour cela on utilise le BFO du récepteur et on règle sa fréquence jusqu'à obtenir des signaux basse fréquence de 2.125Hz et 2.975Hz dans te cas standard du shift 850Hz. Sur la figure 3.1 nous avons représenté les relations entre le réglage du récepteur et le réglage du BFO qui sont nécessaires pour une bonne détection. La sélectivité MF doit être choisie pour passer juste la bande de modulation, ce qui rend l'accord un peu plus délicat mais améliore les résultats. Dans le cas d'un shift de 850Hz, on voit que la fréquence du BFO doit se trouver à 2.550Hz du centre de la MF, c'est-à-dire à la valeur moyenne des deux fréquences correspondant aux mark et space :
Si l'on décale la fréquence du BFO, il apparaît que le signal space est considérablement affaibli et il en résultera sur la machine l'impression de caractères sans rapport avec ceux transmis et par voie de conséquence un message incohérent.
A noter que la fréquence du BFO peut être inférieure ou supérieure à la fréquence MF.
En résumé, il se confirme bien que le réglage doit être assez précis et qu'il n'est pas possible d'y parvenir autrement qu'avec un appareil spécialement étudié.
Nous verrons donc d'abord un système à œil magique puis ensuite nous parlerons de plusieurs montages utilisant des tubes cathodiques de petite dimension et fonctionnant sous tension faible.
Indicateur d'accord à œil magique (fig. 3.2)
Ce circuit peut être utilisé en le raccordant directement à une sortie BF haute impédance du récepteur, ou s'il n'en existe pas en le raccordant à la sortie basse impédance à travers un transformateur d'adaptation 8ohms/10kohms.
L'indication de l'accord est obtenue à l'aide d'un œil magique 6AF6 dont l'une des plaques est sensible aux mark et l'autre aux space. Pour séparer ces deux types de signaux on dispose d'un ensemble de filtres qui seront choisis pour parfaire l'accord dans le cas de shift 850Hz ou 170Hz.
L'accord de ces filtres si l'on désire obtenir des indications précises devra être réalisé avec soin en débobinant des spires de la self, la capacité étant fixe et de préférence Mylar ou Polycarbonate. Pour cette mesure, le montage de la figure 3.3, est celui que nous conseillons le fréquencemètre pouvant être exclu à la condition impérative de disposer d'un générateur bien calibré et possédant une démultiplication importante.
Régler le générateur à la fréquence d'accord souhaitée et mesurer la tension apparaissant aux bornes du circuit LC avec le voltmètre électronique en position volts alternatifs. De préférence appliquer une tension faible afin de ne pas saturer la self.
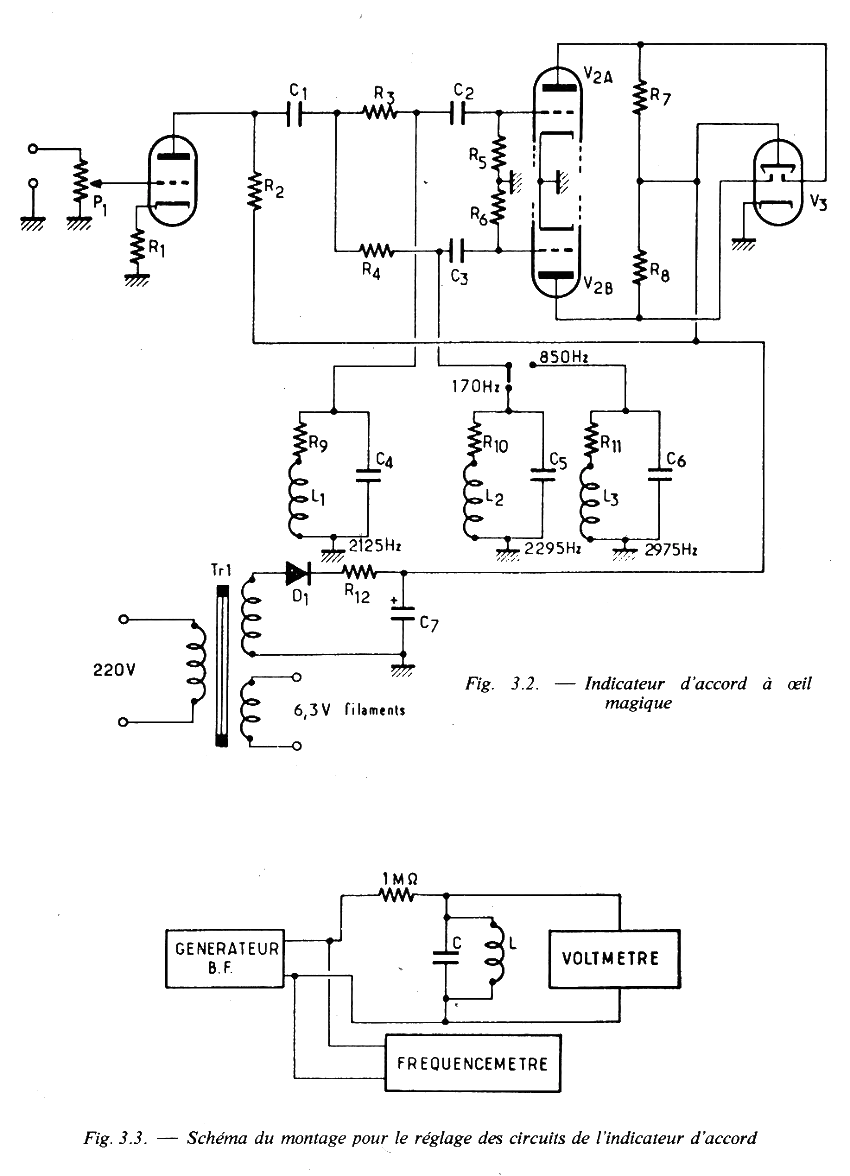
Il suffit alors de débobiner un certain nombre de spires de la self pour obtenir une lecture maximale sur'l'échelle du voltmètre.
En fonctionnement, les deux plaques de l'œil magique s'allumeront au rythme des mark et des space, la surface maximale éclairée correspondant au bon réglage du récepteur, l'amplitude pouvant être réglée à l'aide du potentiomètre P1.
Comme nous l'avons dit ce type d'indicateur semble le plus intéressant et n'est pas pour autant très compliqué à réaliser, il serait même envisageable dans le cas de la construction complète d'une station RTTY d'incorporer l'indicateur et le circuit de décodage dans le même boîtier.
Autre solution pour les heureux possesseurs d'un oscilloscope, celle qui consiste à utiliser cet oscilloscope à condition qu'il dispose d'un amplificateur horizontal en le branchant sur les sorties prévues à cet effet sur différents décodeurs et en prévoyant un circuit d'adaptation.
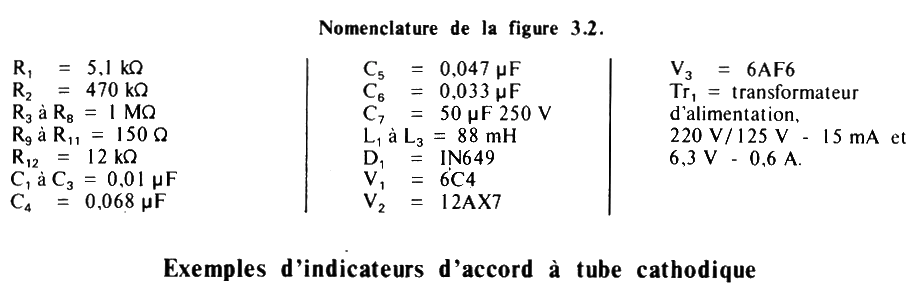
En pratique, suivant le réglage du récepteur on obtiendra sur le tube cathodique des figures très variées et nous en avons reproduit un certain nombre figure 3.4.
En (A) il s'agit d'une figure obtenue en se raccordant à un décodeur dont les circuits ont un coefficient de surtension faible aucun circuit d'adaptation n'étant prévu entre le décodeur et l'oscilloscope. Pour les autres cas de figure, le circuit d'adaptation a été incorporé dans la chaîne de mesure.
En (B) il n'y a pas de signal FSK, mais seulement du souffle.
En (C) il s'agit d'une émission FSK dont le shift est bon mais le réglage du récepteur n'est pas correct.
En (D) le shift est bon et le réglage du récepteur est correct.
En (E) et (F) le signal FSK est incorrect, les mark et les space étant d'amplitudes différentes.
En (G), le réglage du récepteur est bon mais il s'agit d'un shift de faible valeur (170Hz dans le cas standard).
Enfin en (H), il s'agit d'un signal FSK correct : le récepteur est bien réglé, mais le niveau du signal est faible.
Si un signal FSK correct peut être reçu, en s'approchant de sa fréquence on doit voir sur l'écran du tube cathodique une croix dont l'amplitude des quatre branches augmente, atteint son maximum lorsqu'on passe sur le réglage correct puis décroît si l'on continue de faire varier le réglage du récepteur dans le même sens. Comme nous l'avons dit, si l'on veut obtenir une croix correcte et non pas deux ellipses entrelacées ce qui ne permettrait pas un réglage aussi précis, il est nécessaire de prévoir un adaptateur entre le décodeur et l'oscilloscope, cet adaptateur comportant essentiellement des circuits accordés à fort coefficient de surtension. Les fréquences d'accord de ces circuits sont évidemment celles des mark et des space soit 2.125Hz et 2.975Hz pour le cas général mais il est également possible de prévoir une commutation sur le circuit space afin de passer de 2.975Hz à 2.295Hz.
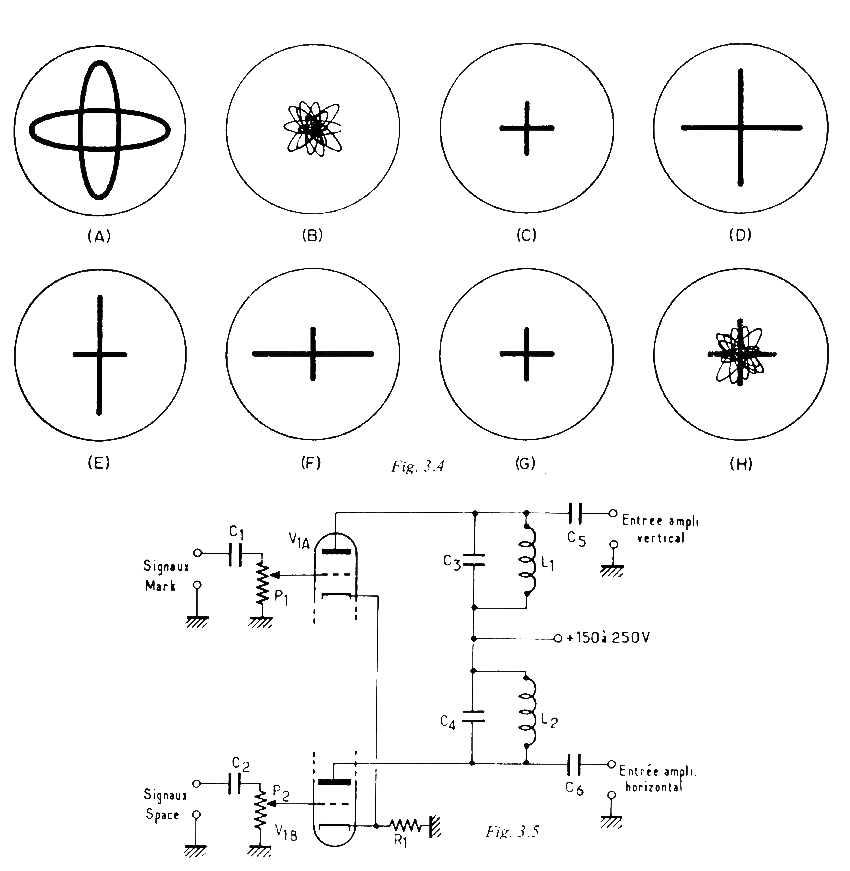
Nous avons représenté figure 3.5 le schéma très simple d'un adaptateur utilisant une double triode dont les grilles sont attaquées par les signaux venant du décodeur. Selon le type utilisé les points de mesure peuvent être différents, et il est préférable de faire un essai en différents endroits et de choisir ensuite celui qui permet d'obtenir la trace la plus nette.

On peut donc raccorder cet adaptateur à un oscilloscope, ou bien, ce qui évite d'immobiliser un appareil aussi utile uniquement pour la réception RTTY, réaliser un indicateur à tube cathodique, en utilisant un tube de petit diamètre nécessitant une haute tension de quelques centaines de volts seulement. Un tel appareil peut être réalisé en partant du schéma de la figure 3.6, toute latitude étant laissée quant au choix du tube cathodique, mais nous pouvons conseiller par exemple le 2API ou le 3EP1 qui est utilisé dans la réalisation décrite plus loin. Il n'est pas prévu de réglage pour le centrage du spot, la fabrication des tubes étant généralement telle qu'une correction n'est pas nécessaire pour ce genre d'application mais si vraiment cela se révélait indispensable, il est possible de corriger le mauvais centrage du spot à l'aide d'un petit aimant dont on choisira judicieusement l'emplacement sur la paroi du tube. Lors du réglage de l'adaptateur, on pourra se servir de l'indicateur à tube cathodique pour caler les circuits accordés sur 2.125Hz et 2.975Hz.
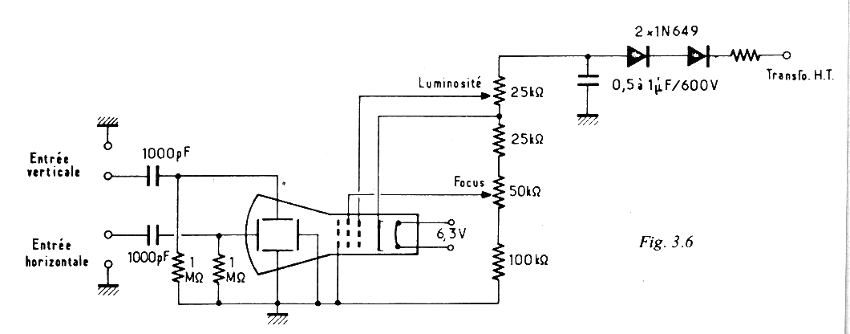
Il suffit pour ce faire de disposer d'un générateur assez précis dont on réglera la fréquence de sortie successivement aux deux valeurs indiquées et de jouer soit sur la capacité en parallèle sur la self soit sur le nombre de spires de la self elle-même pbur obtenir une déviation maximale du spot donc un trait de longueur maximale sur l'écran, en vertical dans un cas en horizontal dans l'autre.
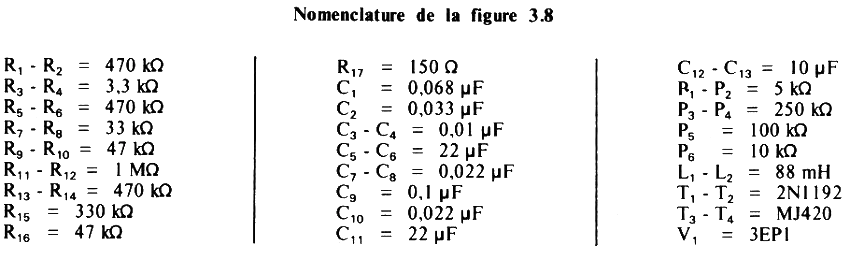
La généralisation des décodeurs transistorisés et même réalisés avec des circuits intégrés, les montages à lampes sont quelque peu démodés et encombrants, aussi nous pensons que le montage que nous décrivons ci-dessous sera plus à même d'intéresser les nouveaux venus à la RTTY. Il a été tout spécialement prévu pour être employé avec les décodeurs ST5 et ST6, mais il peut bien sûr s'adapter aux autres sans modification notable.
Les circuits d'amplification sont simples, il s'agit à l'entrée et en vertical comme en horizontal, d'un étage émetteur suiveur pour obtenir une impédance d'entrée élevée et d'un étage amplificateur à gain réglable utilisant un transistor haute tension.
Comme nous l'avons indiqué pour le cas précédent, les filtres du décodeur ont un faible coefficient de surtension et ceci ne permet pas d'avoir sur l'écran des droites mais des ellipses, car, par exemple, en présence d'un mark, il y a toujours une tension, faible c'est certain, mais non négligeable sur la sortie space. Pour éviter ceci, il a été inclus dans le même boîtier deux circuits accordés à coefficient de surtension élevé, l'un accordé sur 2 125Hz, l'autre sur 2 975Hz si l'interrupteur S, est ouvert, et sur 2 295Hz si S, est fermé. Pour le réglage de ces circuits on se reportera à ce qui précède.
Les fonctions des différents potentiomètres sont les suivantes :
P1 = gain de l'ampli vertical.
P2 = gain de l'ampli horizontal.
P3 = centrage vertical.
P4 = centrage horizontal.
P5 = focus.
P6 = luminosité.
Nous terminerons ce chapitre en nous intéressant à un autre genre d'indicateur à tube cathodique dit à variation de phase. Ce système semble présenter de meilleures performances que celui de l'appareil décrit précédemment, car il ne nécessite pas l'emploi de filtres très sélectifs qui font disparaître un certain nombre d'informations utiles à connaître.
Cet indicateur peut être raccordé directement à la sortie du récepteur ou du décodeur, et on peut observer sur l'écran des figures correspondant à celles représentées ci-dessous (Fig. 3.10).
Le principe de fonctionnement est le suivant (Fig. 3.9) : le circuit résonnant LC est accordé sur une fréquence proche de celle qui nous intéresse : à cette valeur, l'impédance est minimale et par conséquent la tension V, est proche de zéro, alors que V2 est importante et présente des variations de phase importantes de part et d'autre de cette fréquence.
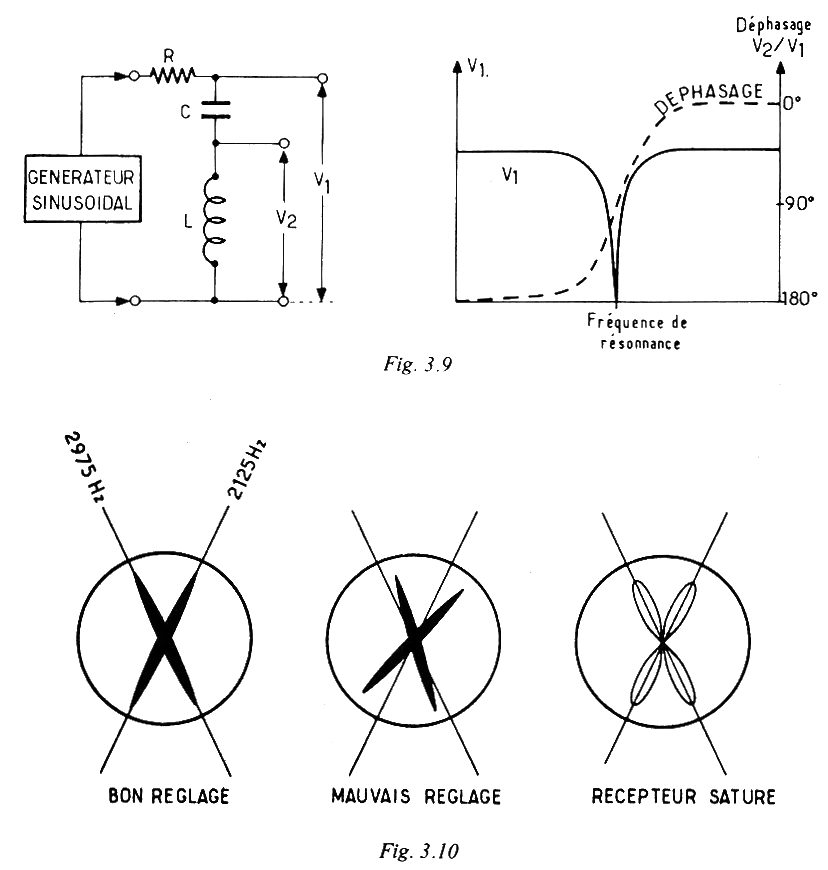
On sait que deux sinusoïdes appliquées sur les entrées d'un oscilloscope produisent une figure dont la forme dépend des amplitudes et du décalage de phase entre ces deux sinusoïdes ; ainsi deux signaux de même fréquence en phase ou en opposition de phase feront apparaître une droite dont l'angle par rapport à l'horizontale sera fonction des amplitudes relatives. Si les deux signaux sont déphasés de 90°, la figure obtenue est une ellipse dont la forme sera plus ou moins allongée selon que la différence entre les amplitudes sera plus ou moins importante.
Appliquons ceci au circuit de la figure 3.9.
A la fréquence de résonance il apparaîtrait normalement une ellipse car dans ce cas, les deux signaux sont déphasés de 90°, mais il s'agit en réalité d'une ellipse très plate donc assimilable à un trait puisque, à cette valeur de la fréquence, l'amplitude de V, est nulle. Ce trait s'inclinera de part et d'autre de la verticale selon que la fréquence du signal d'entrée sera inférieure ou supérieure à la fréquence de résonance.
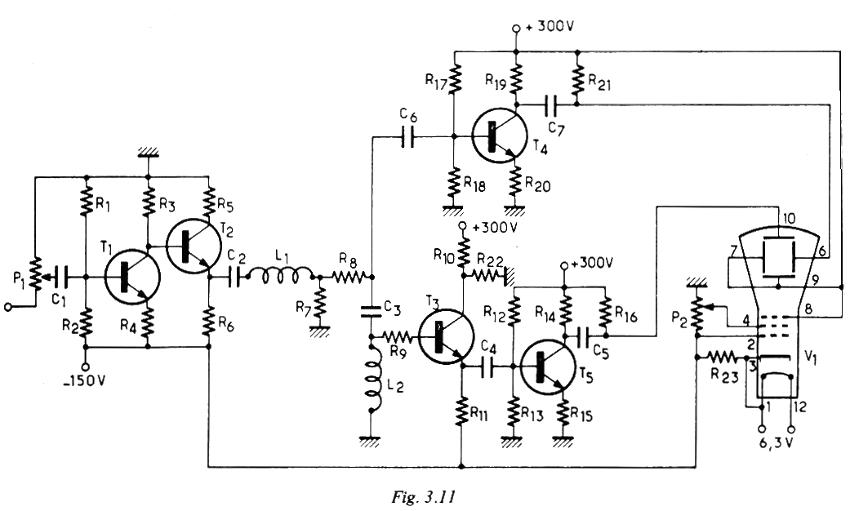
Nous retrouvons ce principe dans le schéma général de l'indicateur d'accord (Fig. 3.11), le circuit RLC étant composé de R8, L2 et C3, C3 et L2 étant accordés sur 2.550Hz.
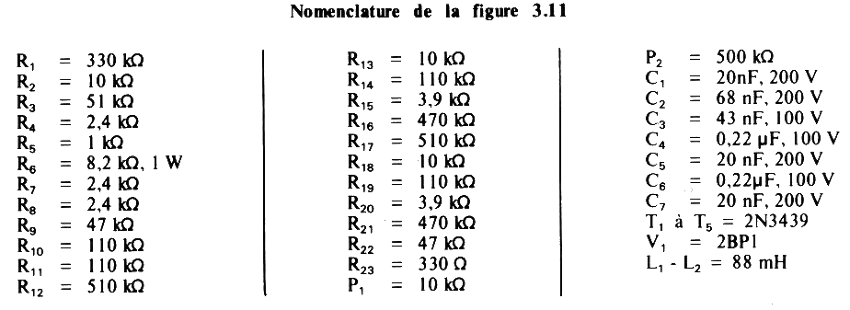
Le transistor T3 a été utilisé pour ne ramener en parallèle sur L2 qu'une impédance aussi élevée que possible de manière à obtenir un coefficient de surtension important.
Chaque signal est appliqué séparément à deux étages amplificateurs identiques équipés de transistors 2N3439 (T4 et T5) qui attaquent les plaques verticales et horizontales du tube cathodique.
Un circuit de compensation composé de R7, L1 et C2 a été ajouté car son impédance augmente avec la fréquence entre 2 et 3kHz et équilibre la tension aux bornes de L2 (normalement cette tension augmente s'il n'y a pas cette compensation). Le circuit L2-C1 est accordé sensiblement sur 2kHz.
Il sera nécessaire lors de la réalisation de cet appareil d'apporter un soin tout particulier au choix de certains composants, ainsi les condensateurs utilisés dans les deux circuits LC devront être de très bonne qualité, Mylar, Polycarbonate, etc., afin d'obtenir le meilleur coefficient de surtension possible, et de limiter les dérives des fréquences d'accord.
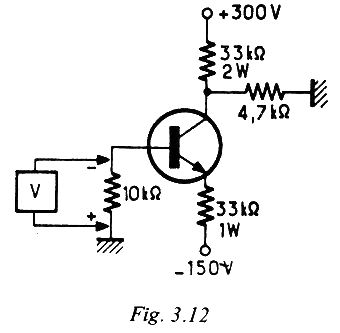
Dans la mesure du possible également, il faudra trier les transistors T2 et T3 et choisir ceux qui ont le gain le plus élevé, toujours dans le but d'obtenir un meilleur coefficient de surtension. Pour cette mesure on peut utiliser le montage de la figure 3.12 qui est très simple et permet de connaître la valeur du courant base, le courant collecteur étant imposé. On choisira donc pour T2 et T3 les transistors avec lesquels la tension aux bornes de la résistance de 10kohms était la plus faible.
N'importe quel petit tube cathodique 2AP1, 2BP1 ou 3AP1 conviendra pour visualiser les informations recueillies. Il n'a pas été prévu de centrage du spot, mais cette opération peut être effectuée avec un petit aimant que l'on collera sur la paroi du tube lorsque son emplacement le meilleur aura été défini.
Il ne reste plus qu'à mettre l'appareil sous tension et à vérifier qu'il fonctionne correctement, tout d'abord en s'assurant des tensions sur les différentes sorties des transistors le potentiomètre P, réglé au minimum.
Ainsi on doit trouver :
- Sur le collecteur T, -1/2 de la tension négative.
- Sur l'émetteur de T2 = la même tension à 1V près.
- Sur l'émetteur de T3 = —0,5 à —1V.
- Sur les collecteurs de T4 et T6 = 1/2 de la tension positive.
Si certaines tensions diffèrent de plus de 20% des valeurs indiquées il faudra jouer sur les résistances R1, R17 et R12 pour les ramener à un niveau correct. En augmentant R1 on diminue la tension négative sur le collecteur de T1 et l'émetteur de T2, en augmentant R17 la tension sur le collecteur de T4 croît, et si l'on augmente R12, c'est la tension sur le collecteur de T6 qui va croître.
Appliquer ensuite sur l'entrée un signal sinusoïdal compris entre 2 et 3kHz : on doit voir apparaître un trait sur le tube cathodique et il faudra alors ajuster l'amplitude jusqu'à ce que l'on obtienne une déviation totale correspondant aux trois quarts du diamètre du tube. Chercher ensuite à obtenir une trace aussi fine que possible à l'aide du potentiomètre focus de 500kohms, et si l'on dispose d'un oscillateur bien calibré ou mieux d'un fréquencemètre on repérera les traces correspondant aux différentes fréquences standard soit 2.125, 2.295 et 2.975, sur le tube cathodique, ou mieux encore on incorporera dans cet appareil des oscillateurs très stables qui serviront de références au calibrage.
L'alimentation de l'ensemble peut être réalisée à l'aide d'un seul transformateur comme représenté figure 3.13, la tension secondaire pouvant être différente à condition de changer la valeur de la résistance série pour obtenir les deux tensions +300V et —150V nécessaires.
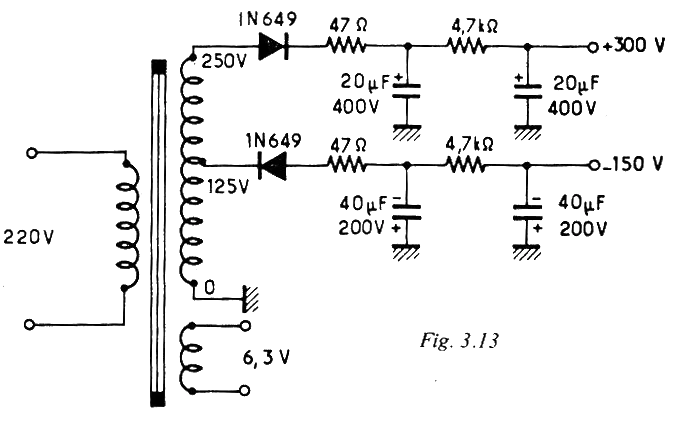
CHAPITRE 4
ÉMISSION RTTY
Après avoir résolu les problèmes de réception des signaux RTTY qui sont de loin les plus complexes à résoudre, on peut, quand on possède une licence, penser à transmettre.
Rappelons qu'il existe principalement deux modes d'émission RTTY qui sont la FSK (ou commande par variation de fréquence HF) et l'AFSK (ou commande par variation d'une fréquence BF).
Si la FSK était la plus utilisée il y a quelques années, l'emploi de plus en plus répandu de la SSB a fait basculer la majorité du côté de l'AFSK.
Dans le cas de la FSK, il faudra faire varier la fréquence de l'oscillateur pilote de telle sorte que, après une ou plusieurs multiplications, éventuellement la fréquence transmise par l'émetteur varie de 850Hz.
Pour ce faire on peut réaliser le montage de la figure 4.1 très simple et très efficace qui utilise une diode germanium classique. Les variations de tension sur la sortie FSK du ST6 que nous prendrons comme convertisseur de référence font changer l'état de la diode 1N270 et par voie de conséquence la fréquence de l'oscillateur, ce qui est le but recherché.
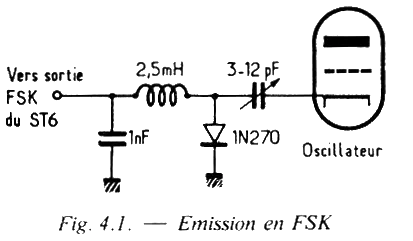
En AFSK le problème est différent puisque les modifications de fréquence se font au niveau de la BF et il faut alors réaliser un oscillateur basse fréquence dont on changera la note au rythme des mark et des space ou même deux oscillateurs que l'on commutera.
Il existe de nombreuses réalisations dans ce domaine, elles sont plus ou moins sophistiquées, nos lecteurs choisiront celle qui semblera être la mieux adaptée à leurs besoins - les plus simples utilisent Deux transistors, les plus compliquées un nombre élevé de circuits intégrés.
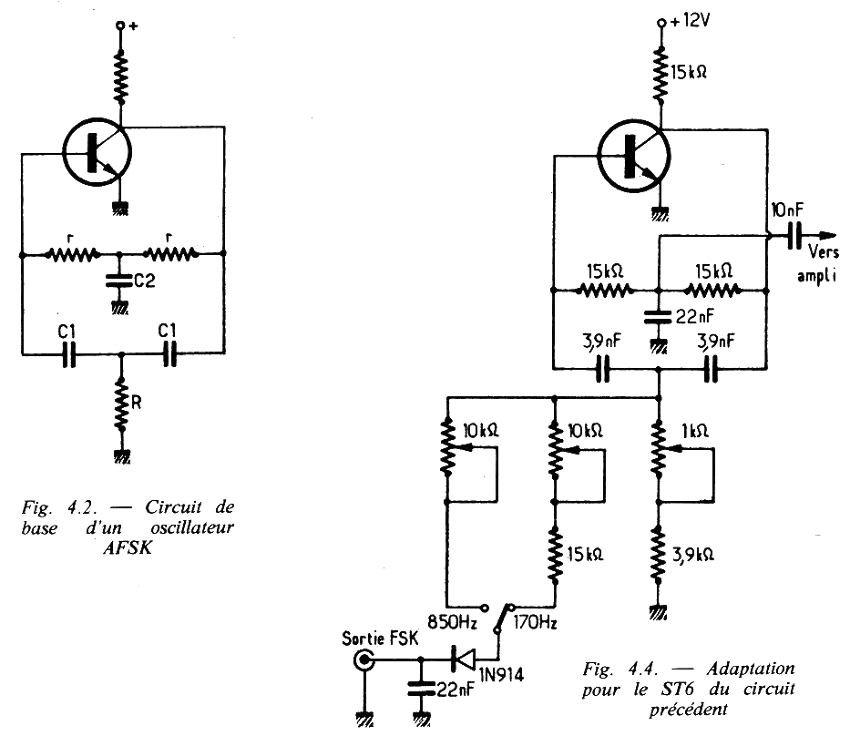
Commençons donc par le plus simple représenté figure 4.3. 11 s'agit d'un oscillateur en double T dont le schéma de base est celui de la figure 4.2 la valeur des résistances et condensateurs se calculant à l'aide des formules suivantes.
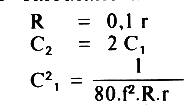
La variation de fréquence s'effectue en jouant sur la valeur de R, plus celle-ci est faible, plus la fréquence est élevée et inversement. Dans la pratique, en nous reportant au schéma de la figure 4.3 nous pouvons avoir plusieurs cas de fonctionnement comme indiqué ci-dessous :
1) le contact du clavier est fermé et le manipulateur ouvert, la diode D1 est polarisée en inverse, et la résistance équivalente à R est la somme de R3 + R4 La fréquence obtenue doit être 2.125Hz.
2) le contact du clavier est fermé, le manipulateur est fermé, la résistance équivalente à R est alors :
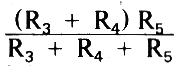
et la fréquence obtenue est de 2.225Hz environ pour l'identification CW.
3) le contact du clavier ouvert et le manipulateur ouvert, si l'inverseur S2 se trouve en position 170Hz, la diode D1 n'est plus bloquée et la résistance équivalente à R est égale à R3 + R4 en parallèle avec R16 plus la résistance interne de D1. La fréquence d'oscillation doit être 2.295Hz.
4) même cas de figure que ci-dessus mais S2 en position 850Hz, la diode D1 est polarisée à une valeur plus élevée et conduit davantage, sa résistance interne est en conséquence plus faible. La valeur de R est réduite donc la fréquence plus élevée, elle sera réglée à 2.975Hz. Le signal de l'oscillateur est appliqué à un transistor amplificateur sur lequel il a été prévu deux sorties haute et basse impédance.
Il est possible d'adapter ce circuit pour l'inclure directement dans le ST6, et nous aurons alors le schéma de la figure 4.4 qui est une transposition de celui de la figure 4.3. A la sortie FSK. du ST6 la tension varie de +30V à —30V environ, la diode se trouve ainsi bloquée ou conductrice et dans ce dernier cas on ramène en parallèle sur la résistance R une résistance variable qui est utilisée pour ajuster la fréquence à la valeur choisie.
Le transistor amplificateur sera monté de la.même façon que pour le circuit précédent, nous ne l'avons d'ailleurs pas représenté.
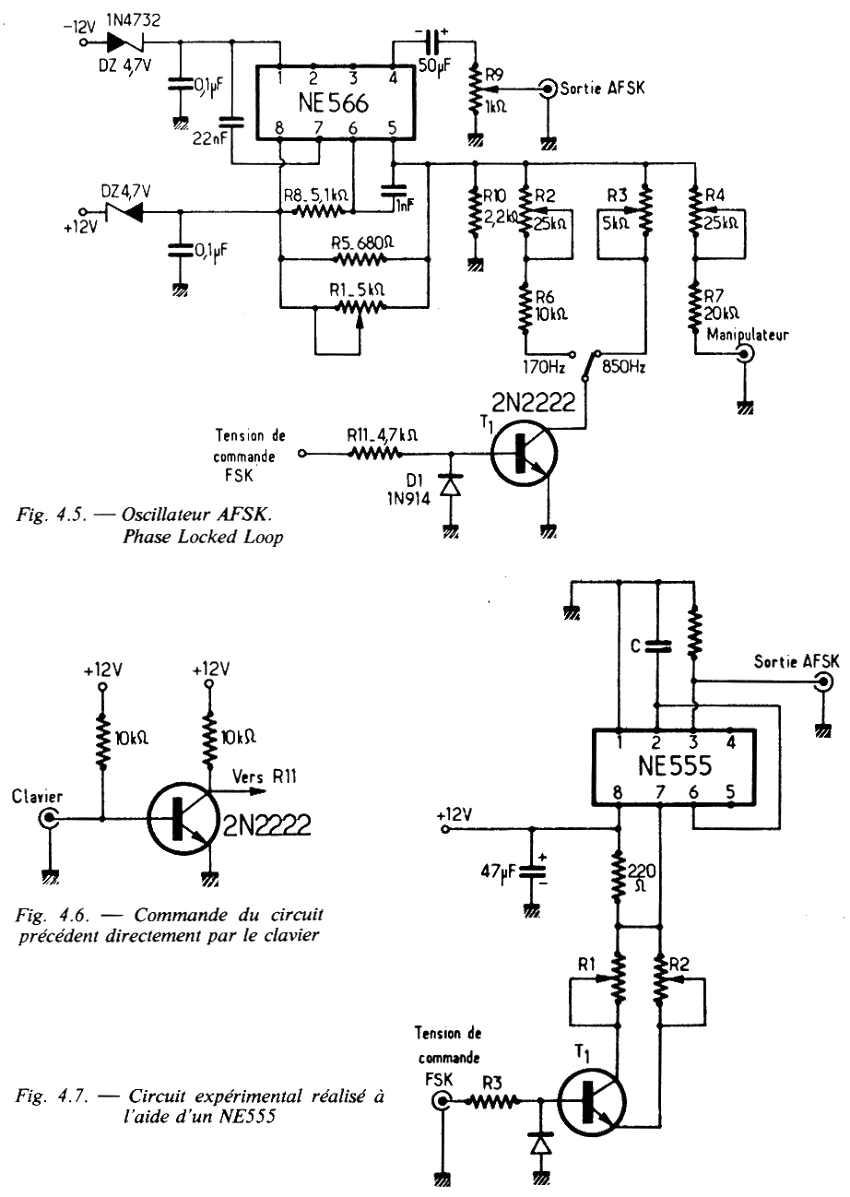
Autre solution pour la réalisation d'un oscillateur AFSK, l'emploi de circuits intégrés « phase-locked loop », ceux-ci permettant d'obtenir une meilleure stabilité en fréquence que les circuits précédents.
Dans le cas de la figure 4.5, c'est un NE566 de Signetics qui est utilisé, il fournit un signal carré ou triangulaire dont la fréquence est fixée à l'aide d'une résistance et d'un condensateur et ajustable par une variation de tension ou de courant sur la borne 5.
Comme pour les circuits à transistors, il faut disposer des quatre fréquences de base, 2.125Hz pour le mark, 2.225Hz pour l'identification CW, 2.295Hz et 2.975Hz pour les space afin de pouvoir travailler avec des shift 170 ou 850Hz.
Nous utilisons encore la tension en sortie FSK du ST6 pour commander les variations de fréquence BF, elle est appliquée directement à un transistor inverseur qui est bloqué en position space. Lorsque T1 est bloqué (mark), la fréquence d'oscillation du NE566 est déterminée par R1, R6 et R10, R1 étant réglée pour obtenir 2.125Hz.
Sur un space, T1 comme nous l'avons dit conduit, R2 et R6 pour un shift de 170Hz (ou R3 pour un shift de 850Hz) sont ramenées à la masse ce qui provoque une diminution de la tension sur la borne 5 et entraîne avec augmentation de la fréquence de sortie, cette valeur sera réglée à 2.295Hz à l'aide de R2 et 2.975Hz à l'aide de R3.
En fermant le manipulateur R4 et R7 sont reliées à la masse, la fréquence d'oscillation doit être réglée à l'aide de R4 à 2.225Hz.
Pour être sûr d'obtenir des réglages corrects on utilisera de préférence un fréquencemètre ou, à défaut, un oscilloscope bien étalonné (une vérification de l'étalonnage est toujours possible avec le 50Hz du secteur).
Pour ceux de nos lecteurs qui ne souhaiteraient pas utiliser la tension de sortie FSK du convertisseur pour commander le générateur, il sera toujours possible de brancher le clavier à l'entrée du générateur, mais il faudra pour cela ajouter un transistor intermédiaire comme indiqué figure 4.6.
Autre générateur AFSK simple, celui représenté figure 4.7 et que nous avons réalisé à titre expérimental sans déterminer les valeurs des composants pour les deux fréquences BF qui nous intéressent.
Le principe en est simple, un circuit intégré NE555 est monté en oscillateur astable la fréquence d'oscillation au repos est déterminée par R2 et C pour le mark, et lorsque, en passant à un signal space, le transistor T1 conduit, R1 et R2 sont mises en parallèle et modifient la fréquence d'origine.
Seules précautions à prendre, choisir R2 de valeur assez importante par rapport à la résistance de 220ohms de façon à obtenir un signal sensiblement carré, et prévoir pour la résistance R3 dans la base de T1 une valeur assez élevée afin de limiter le courant base. T1 peut être un 2N2222 ou un 2N2484 ou encore un BSX52.
La diode D1 protège la jonction base émetteur en inverse lorsque le signal de commande est à sa valeur négative.
Pour terminer ce chapitre, nous avons choisi un générateur beaucoup plus élaboré que les précédents mais aussi beaucoup plus sophistiqué qui a été prévu pour un shift de 170Hz uniquement mais pourrait être éventuellement modifié pour le shift de 850Hz.
Le circuit de base est un oscillateur à quartz dont la fréquence est de 459.259 kHz (Canal 48), dont la valeur est donnée à ±2Hz ce qui garantit une précision sur le shift de 0,1Hz environ.
Le signal de sortie de l'oscillateur est appliqué à un diviseur utilisant des flip flop JK du type SN7473 (Z1-Z2 et Z3) et dont le rapport de division est de 25 lorsque l'entrée est reliée à la masse (niveau 0) et de 27 lorsque l'entrée est au niveau 1.
Ce diviseur à rapport variable est suivi d'un second diviseur dont le rapport est de 8, fixe, ce qui nous donne pour l'ensemble une division de 8 x 25 = 200 ou 8 x 27 = 216, donc des fréquences de sortie égales à :
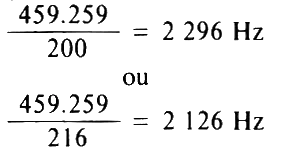
Le signal divisé est ensuite appliqué à un filtre passe bande composé de deux amplificateurs opérationnels, qui a pour but d'éliminer toute trace d'oscillation sur des fréquences autres que 2.125 ou 2.295Hz. Les deux résistances variables R8 et R11 permettent d'ajuster la fréquence centrale du filtre à une valeur telle que les deux signaux générés aient la même amplitude de sortie.
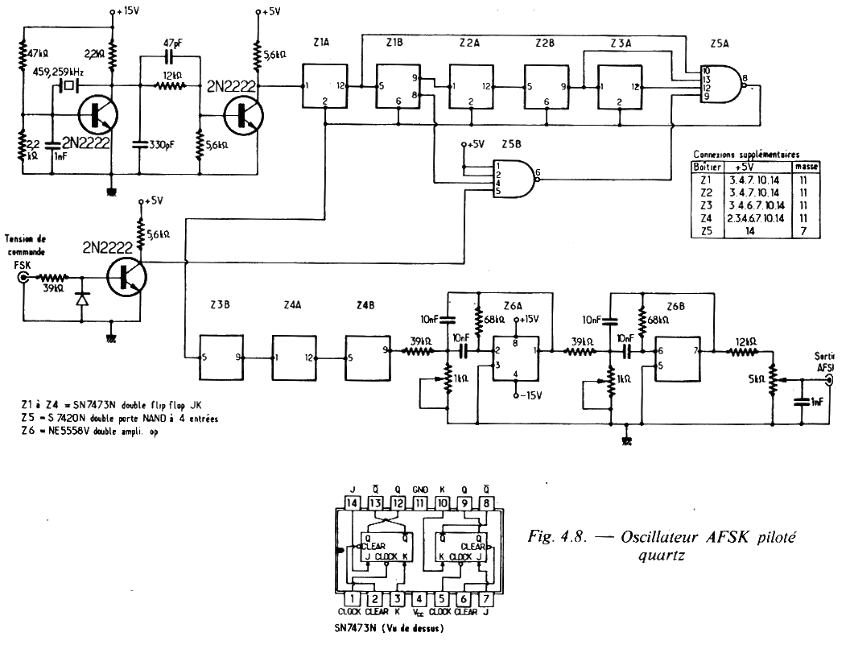
CHAPITRE 5
LES TÉLÉIMPRIMEURS
Les téléimprimeurs
Nous avons parlé essentiellement jusqu'à maintenant des circuits électroniques d'une station RTTY, circuits électroniques indispensables à la transformation des signaux captés par le récepteur en impulsions tout ou rien qui vont commander le téléimprimeur.
Nous allons donc abandonner totalement l'électronique pour nous consacrer à la mécanique et, mais très peu, à l'électricité, car s'il existe dans le domaine professionnel des systèmes d'impression très élaborés dans lesquels la mécanique est reléguée au second rang ou même pour les amateurs fortunés des systèmes entièrement électroniques avec affichage sur tube cathodique, la plupart des amateurs sont obligés de se contenter du classique Creed, Télétype, Sagem ou autre Siemens. Ce que l'on peut reprocher à ces machines mécaniques, c'est évidemment le bruit et l'usure des pièces mécaniques qu'il est parfois difficile de se procurer compte tenu de l'ancienneté des téléimprimeurs trouvés dans les surplus.
Pour le bruit il n'y a évidemment pas grand chose à faire puisqu'il s'agit tout simplement d'une machine à écrire et que celle-ci n'a jamais été donnée en exemple pour son silence en fonctionnement et de plus dans un téléimprimeur certains mouvements ont été ajoutés. Donc prendre son mal en patience est pratiquement la seule chose à faire à moins de placer cette machine dans un boîtier aussi bien insonorisé que possible.
Pour ce qui est du remplacement des pièces mécaniques le problème est parfois fort gênant car les rechanges sont souvent difficiles à trouver et il arrive que l'on soit obligé de disposer de deux machines pour en faire fonctionner une en permanence. Par ailleurs lorsqu'une pièce vient à casser, même si l'on dispose d'une autre en rechange il faut d'abord réparer, et reprendre ensuite certains réglages qui n'ont rien d'évident et qui s'ils sont mal effectués ne permettront pas de revenir à un fonctionnement normal du téléimprimeur.
Nous allons donc essayer d'éclairer autant que faire se pourra ceux de nos lecteurs qui ont, ou auront, des problèmes mécaniques sans entrer dans le détail de chacune des machines car il faudrait un nombre de pages non négligeable, mais en reprenant les sous-ensembles mécaniques principaux qui sont assez semblables dans tous les téléimprimeurs. Nous ne parlerons pas toutefois des appareils à bande dont l'intérêt n'est pas très grand pour les amateurs, mais de ceux à page sur lesquels la lecture est beaucoup plus aisée et qui sont les plus courants dans notre domaine.
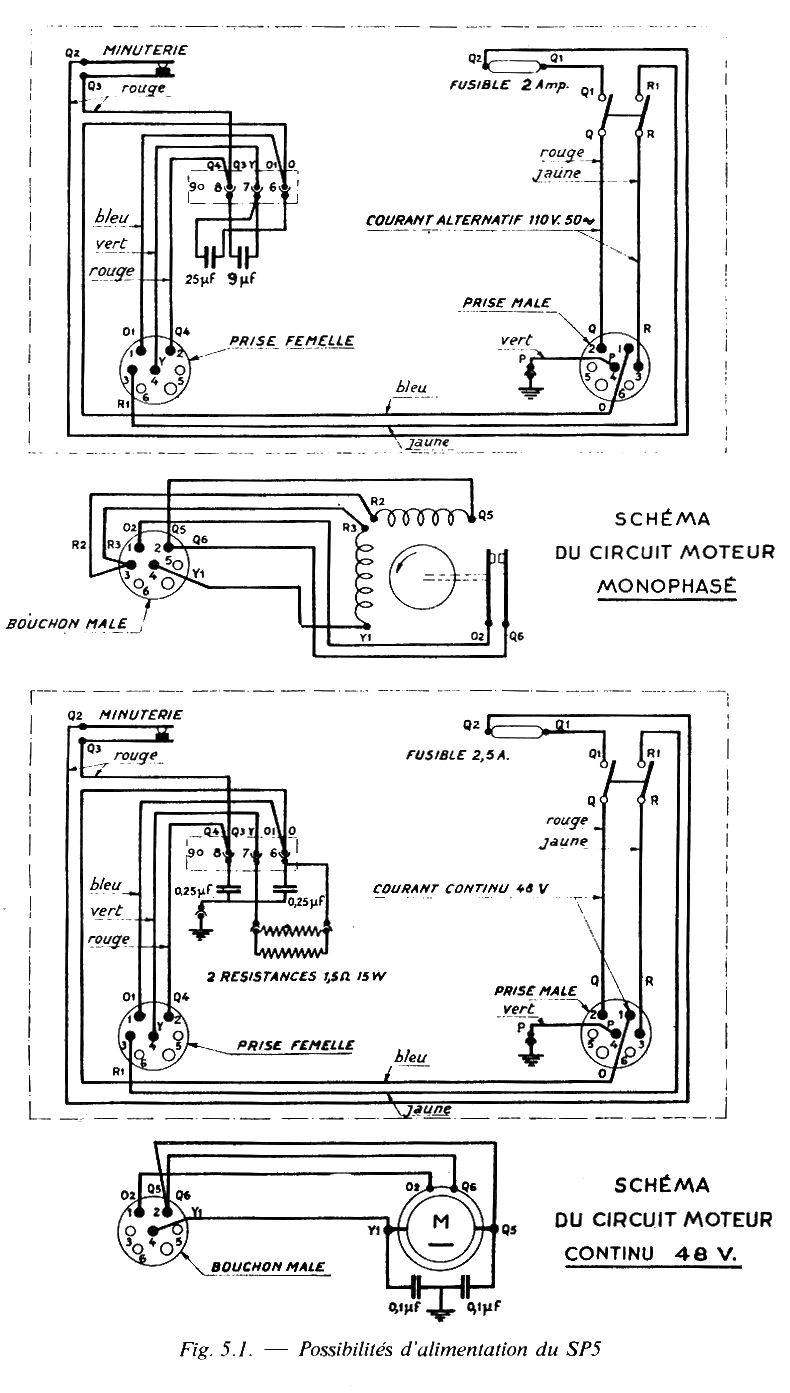
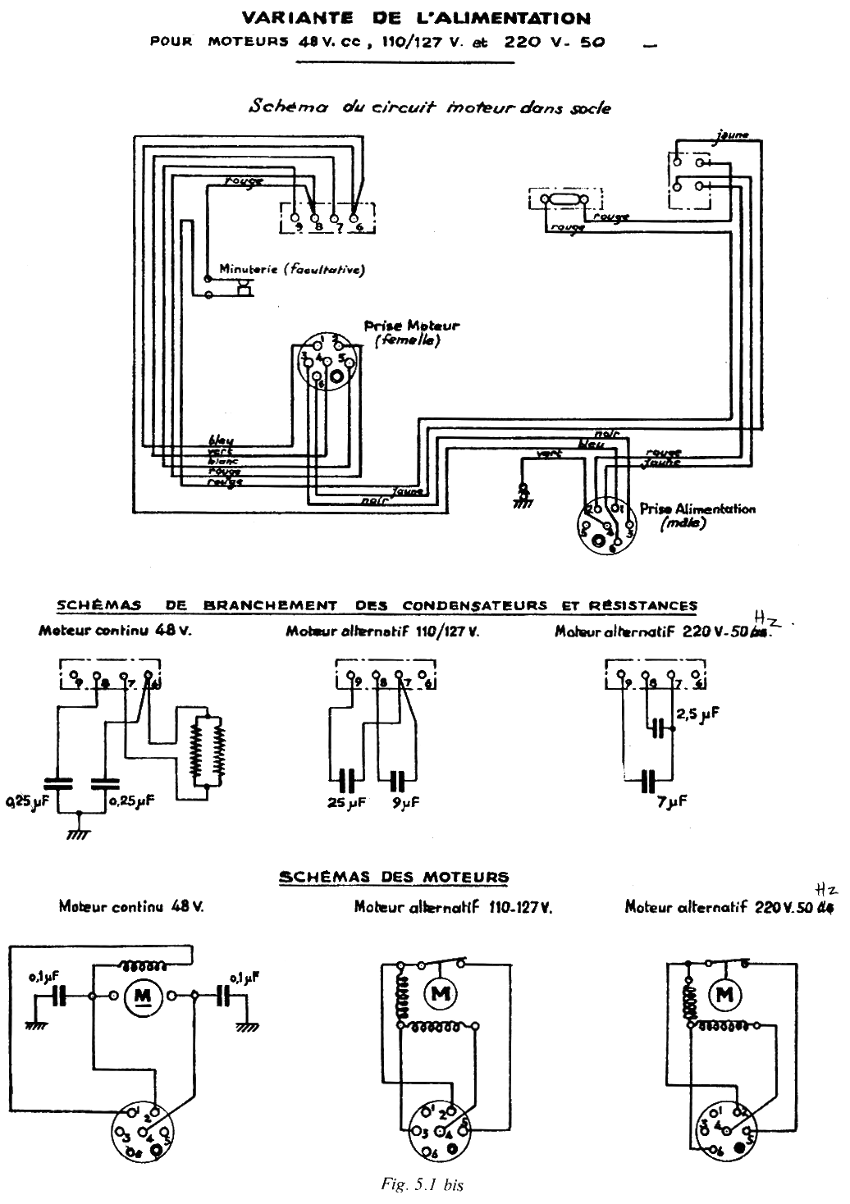
Avant tout il faut savoir quelles sont les possibilités d'un téléimprimeur classique et ensuite comprendre le principe de fonctionnement. Ces deux points assimilés chacun doit pouvoir approfondir les petits détails qui caractérisent sa machine personnelle, être en mesure de porter remède à une défaillance mécanique.
Commençons donc par le début et voyons ce qu'il est possible de demander à un téléimprimeur semblable à ceux dont nous avons indiqué la marque ci-dessus. Un téléimprimeur peut recevoir ou transmettre un message et éventuellement servir de machine à écrire (uniquement en lettres majuscules) mais cette dernière utilisation n'est évidemment pas celle qui nous intéresse le plus.
Recevoir un message, cela veut dire que les impulsions 0 ou 1 recueillies en sortie du convertisseur RTTY sont groupées, décodées et la lettre ou le chiffre correspondant est imprimé. Transmettre un message, cela veut dire qu'en appuyant sur une touche du clavier, on génère une succession d'impulsions 0 ou 1 qui correspondent à la lettre ou au chiffre indiqué sur cette touche.
Nous prendrons pour détailler nos explications l'exemple du téléimprimeur Sagem SP 5 qui est un matériel très performant utilisé par de nombreux services. Certes il ne s'agit pas d'un appareil très moderne mais il a l'avantage, par sa conception de se rapprocher des autres appareils de surplus.
A la base du fonctionnement de l'ensemble se trouve le moteur qui sera suivant les machines en 48Vcc, 110Vca ou 220Vca. Ce point sera évidemment à vérifier avant tout branchement. Il s'agit pour les tensions alternatives d'un moteur synchrone, dont la vitesse est réglée à 3.000 tours/minute, et qui fonctionne en diphasé, une capacité du papier de 9µF en 110V et 2.5µF en 220V déphasant les courants dans les deux enroulements.
Une seconde capacité de 25µF en 110V et 7µF en 220V est connectée en parallèle sur la précédente seulement au moment du démarrage afin d'améliorer le couple et diminuer la durée de lancement. Lorsque le moteur atteint environ 2.000 tours/minute un secteur centrifuge déconnecte cette capacité.
Le mouvement du moteur est transmis (fig. 5.2) :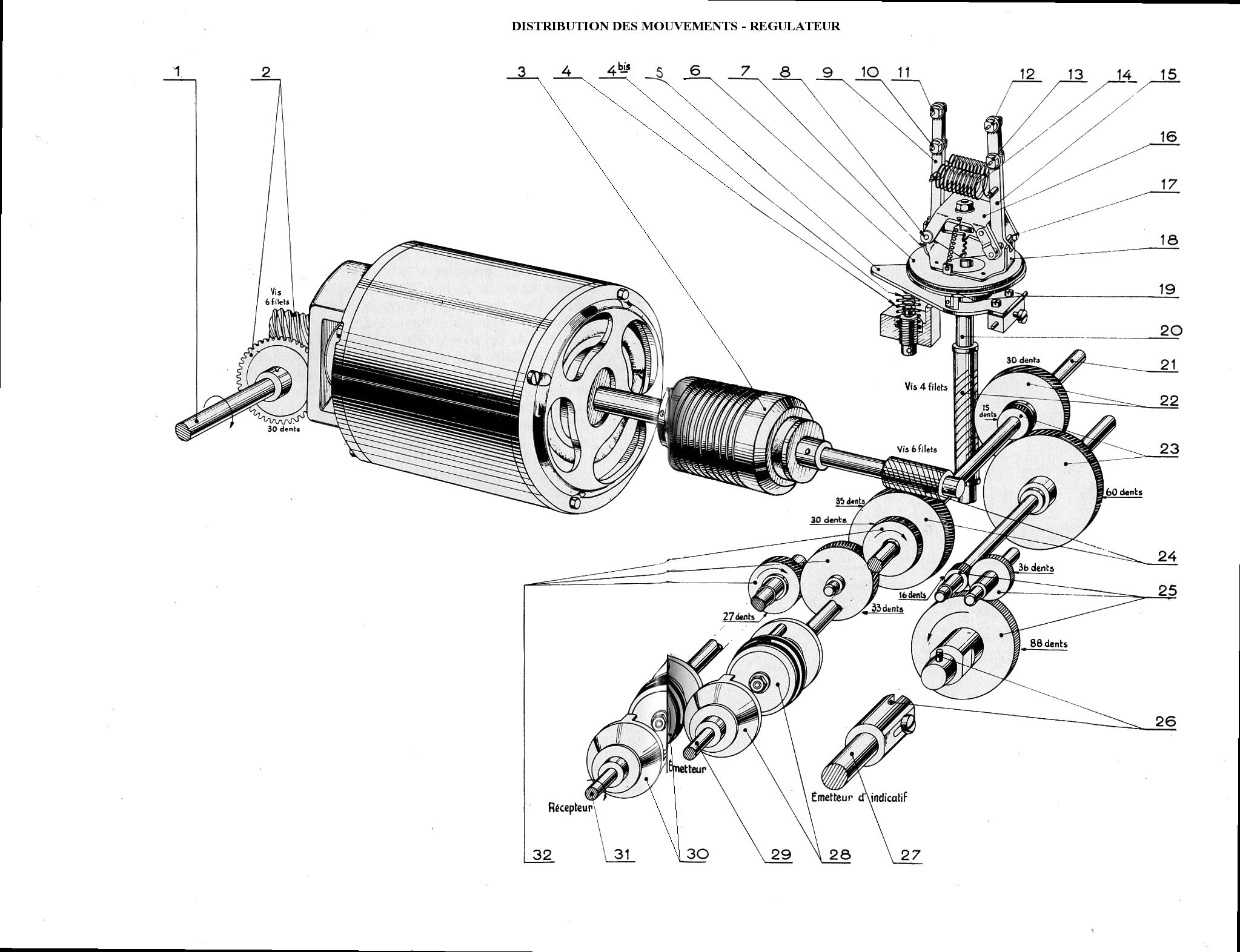
- par l'ensemble roue et vis (2) à l'arbre de traduction (1).
- par la friction à disques superposés (3) et les ensembles roue/vis sans fin (22) et (24) au régulateur et à l'arbre (21). Ce dernier étant couplé au régulateur tourne à une vitesse parfaitement constante.
Le mouvement de l'arbre (21) est transmis : par l'embrayage à friction (28) à l'arbre distributeur d'émission (29) qui effectue un tour en 150 millisecondes.
- par le jeu de pignons (32) et l'embrayage à friction (30) à l'arbre de réception (31) qui effectue un tour en 135 millisecondes.
- par les ensembles de pignons (23) et (25) et l'accouplement (26) à l'arbre émetteur d'indicatif (27).
Supposons maintenant que l'on souhaite transmettre un caractère (fig. 5.3) il faut appuyer sur une touche commandant le levier (43) qui pivote autour de l'axe (1) comprime le ressort de rappel (3) et enfonce 5 barres de sélection. Au total il y a 10 barres de sélection divisées en 5 paires, les deux barres d'une même paire étant découpées de telle sorte qu'une partie pleine de l'une corresponde toujours à une partie découpée de l'autre. Une seule barre de chaque paire doit donc s'enfoncer pour chaque caractère. Sur la figure, une seule paire (7) et (8) est représentée et nous voyons que c'est la barre (7) qui présente une partie pleine sous le levier en conséquence elle s'enfoncera.
Deux leviers (33) et (49) réunis par la tige (36) supportent la barre (7) à ses extrémités, ils sont amenés à pivoter respectivement autour des axes (32) et (48) lorsque la barre est enfoncée, ce qui entraîne la translation de la tige (36) vers la gauche. Lorsque la touche est relâchée l'ensemble est ramené à sa position initiale par les ressorts de rappel (3) et (46). Le même phénomène se produit sur les quatre autres paires de barres, il convient toutefois de noter que les tiges se déplaceront vers la droite ou vers la gauche, ceci dépend de la barre enfoncée (barre postérieure : mouvement vers la droite, barre antérieure : mouvement vers la gauche).
En bout des leviers (33) et (34) se trouvent respectivement les pattes (31) et (30) qui manœuvrent la barre (28) de l'emmagasineur vers la droite ou vers la gauche. Les cinq barres de l'emmagasineur sont ainsi mises en place simultanément elles coulissent sur les arbres (20) et (29) et entraînent chacune un levier (27) qui pivote autour de son axe et dont la pointe (26) est maintenue en position par un galet sautant (24). Ceci assure l'immobilité de chaque ensemble. La pression du galet peut être réglée en jouant sur le réglage de vis (21) qui tend ou détend le ressort (22).
Sous la première paire de barres est placé le doigt (44) qui s'abaisse lorsque l'une d'elles est enfoncée, le levier (45) pivote alors autour de son axe et son mouvement est transmis par les pièces (47), (51) et (2) à la tringle de déclenchement de l'émetteur (4).
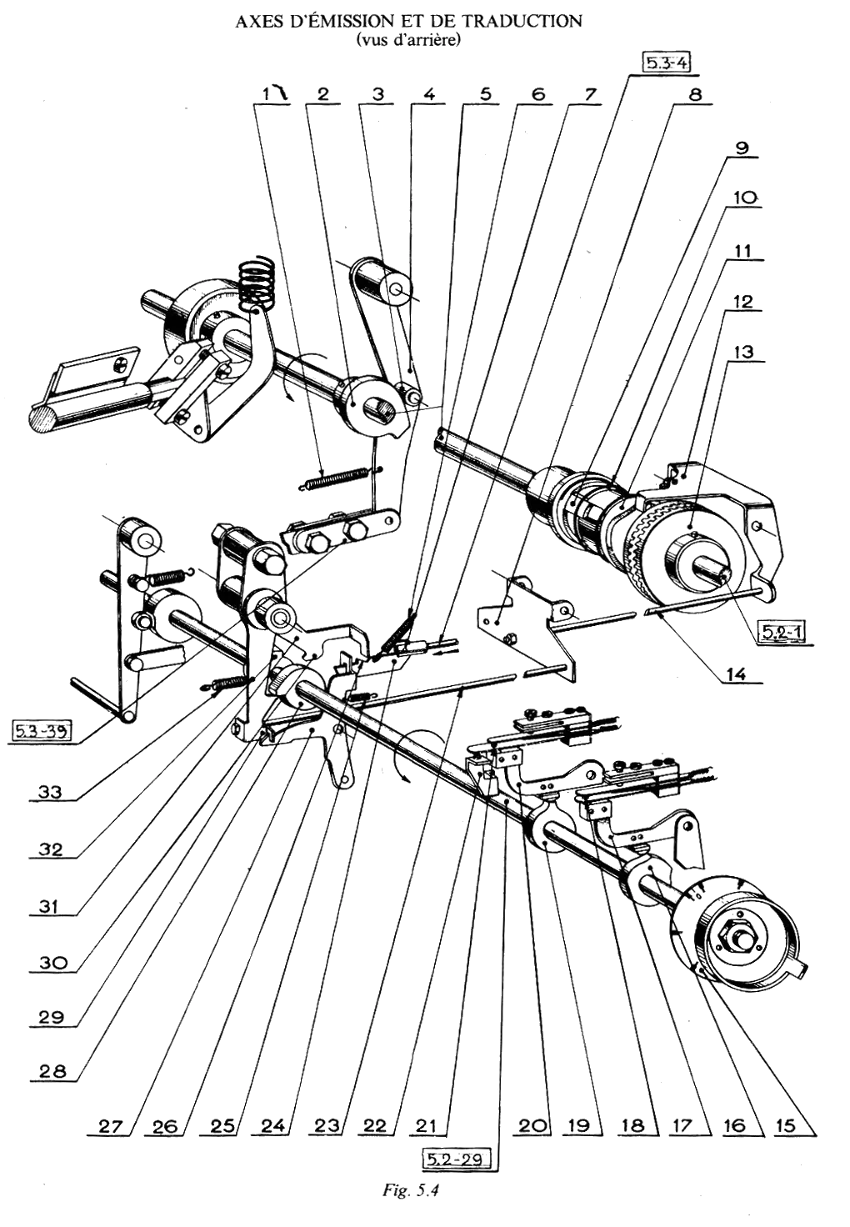
Il faut nous reporter maintenant à la figure 5.4 où nous voyons la tige 5.3-4 dont nous venons de parler qui agit dans le sens de la flèche et fait pivoter la gâchette (27) autour de son axe par l'intermédiaire du bec (26) du poussoir (24). La gâchette (27) libère la patte du levier d'arrêt de l'arbre de distribution d'émission (29). Ce levier est rappelé en arrière par le ressort (33), il tire sur la tringle (23) qui transmet son mouvement à la tige (14) par l'intermédiaire de la plaquette articulée (8), et le cliquet d'arrêt (12) pivote.
Au repos ce cliquet maintient la partie libre (11) d'un embrayage à dents écarté de la denture (13) qui est solidaire de l'arbre de traduction 5.2-1 tournant en permanence. Lorsque le cliquet pivote la partie libre (11) coulisse, tirée par le ressort (10) les deux dentures viennent en prise, et l'arbre (5) est entraîné par l'intermédiaire de la griffe (9). La came (2) pousse le levier (4) qui tire sur la barre de transfert 5.3-39. Le galet (3) est maintenu en permanence au contact de la came à l'aide du ressort (1).
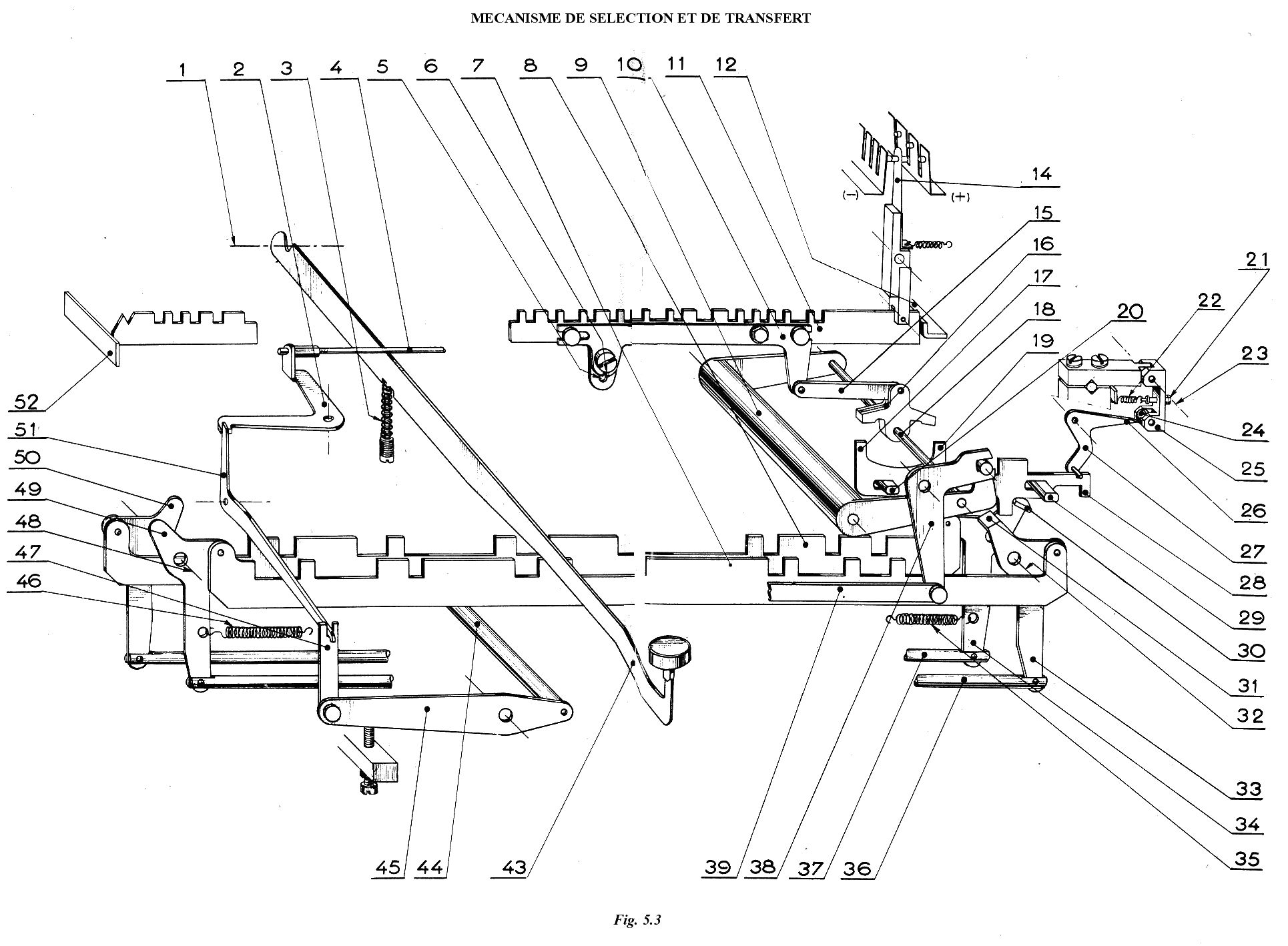
Reportons-nous à la figure 5.3 (cliquez sur les vignettes pour agrandir) pour voir que le mouvement de la barre de transfert (39) est transmis au levier (38) ainsi qu'à l'étrier (9) qui porte un axe (18) sur lequel sont montés cinq culbuteurs, de transfert (16) (un seul est représenté). Lorsqu'ils descendent, ils heurtent suivant la position des barres de l'emmagasineur correspondantes, le bec (17) ou (19). Le mouvement de chaque culbuteur est transmis à une barre combinatrice (11) par l'intermédiaire de la biellette (15) et de la barrette de réglage (10). Chaque barre combinatrice est limitée dans sa course par les butées (12) et (52).
 La suite des opérations est indiquée fig. 5.5
où nous pouvons voir qu'au repos les barres combinatrices sont bloquées par le couteau
(50) mais dès que l'arbre 5.4-5 se met à tourner la came (49) soulève ce couteau qui
pivote et retombe, rappelé par le ressort (52) à la fin du mouvement de transfert.
Ainsi, dès le début du tour effectué par l'arbre de distribution d'émission la
combinaison a été transférée dans les barres combinatrices.
La suite des opérations est indiquée fig. 5.5
où nous pouvons voir qu'au repos les barres combinatrices sont bloquées par le couteau
(50) mais dès que l'arbre 5.4-5 se met à tourner la came (49) soulève ce couteau qui
pivote et retombe, rappelé par le ressort (52) à la fin du mouvement de transfert.
Ainsi, dès le début du tour effectué par l'arbre de distribution d'émission la
combinaison a été transférée dans les barres combinatrices.
Après ce transfert, le volet de traduction (40) toujours tiré vers l'avant par le ressort (47) et qui a sa position définie par le profil de la came de traduction (44) va se déplacer d'arrière en avant, les leviers chercheurs (39) viennent en appui sur les barres combinatrices 5.3-11. Sous un chercheur et un seul, cinq encoches sont alignées, le volet laisse tomber ce chercheur plus bas que les autres et le tire vers l'avant par son extrémité en forme de crochet. Le levier (34) et la biellette (27) transmettent ce mouvement au levier porte caractère qui vient frapper le papier d'où impression du caractère désiré. Quand l'arbre à came termine son tour, le volet de traduction est ramené en arrière relevant ainsi tous les leviers chercheurs. Le seul levier porte caractère qui a été actionné retombe sur le butoir circulaire (37).
Le cliquet d'arrêt 5.4-12 quand il est retombé a forcé la pièce 5.4-11 à se déplacer vers la gauche, ainsi, sa denture s'est dégagée de celle de la pièce 5.4-13 qui tourne en permanence.
Un ergot (48) vient buter sur le cliquet d'arrêt dès que les dentures sont dégagées, il permet de fixer une position de repos bien déterminée à l'arbre à cames 5.4-5.
En même temps que s'imprime le caractère, le téléimprimeur doit générer un train d'impulsions caractéristique à la lettre ou au chiffre. On peut suivre l'enchaînement sur la figure 5.4.
L'arbre à came de distribution d'émission est entraîné par le palier régulateur au moyen d'un embrayage à friction dont la vitesse est parfaitement constante. Au repos, l'embrayage patine.
Lorsque le levier d'arrêt (29) n'est plus maintenu par la gâchette (27), il libère la came de déclenchement (28) et l'arbre à cames se met à tourner dans le sens de la flèche.
Le bras (31) est solidaire du levier (29) et s'appuie devant la rotation sur la came (32) dont le profil en spirale provoque le pivotement de l'ensemble des leviers (29) et (31) jusqu'à ce que la patte d'accrochage de (29) vienne s'encliqueter sur le bec de la gâchette (27).
Pendant le tour de l'arbre sept ensembles identiques à (16), (17) et (18) ont été mis en fonctionnement, ceci pour générer les cinq impulsions caractéristiques ainsi que le start et le stop. Le poussoir (17) est en appui sur la came (16) qui en pivotant amène les deux lames (18) en contact.
Il existe une autre came (19) qui forme avec le poussoir (20) et les deux contacts (21) et (22) le dispositif de commutation émission-réception. Au repos c'est le contact supérieur qui est fermé et dès le début de la rotation de l'arbre, avant même l'apparition de l'impulsion de départ, c'est le contact inférieur qui se ferme.
Ce qui précède concernait l'émission d'un caractère lorsqu'une touche du clavier a été enfoncée, nous allons considérer maintenant la réception d'un train d'impulsions recueilli à la sortie du convertisseur RTTY.
Ces impulsions sont appliquées (fig. 5.6) à la bobine de l'électroaimant et les mouvements de son armature au rythme des impulsions sont transmis à (9) par la biellette (29) et le levier (30).
Au repos l'armature (23) est en position haute, la came d'arrêt (46) est bloquée par le cliquet (45) qui est monté sur un index mobile (43) fixé par la vis (41) sur le secteur gradué (42).
Lorsque l'électroaimant reçoit une impulsion son armature mobile pivote vers le bas et la patte de (9) lâche le cliquet (11). Le ressort (47) dégage le cliquet (45) du bec de la came (46) ce qui autorise la mise en route de l'arbre de réception. L'extrémité du levier (44) est repoussée et le cliquet (34) libère le levier (33) qui bascule puis vient prendre appui sur la butée (31).
Dès le début du cycle la came d'effacement (58) laisse retomber le levier de rappel (59) tiré par le ressort (57) ainsi toutes les barres de l'emmagasineur sont placées en position extrême droite. Ensuite le levier est ramené en arrière afin de laisser les barres de l'emmagasineur libres de se déplacer et transcrire les impulsions.
A peu près au milieu de la première impulsion de code la came de correction (54) fait basculer le levier de correction dont le bec (4) tombe sur le couteau (5) et l'ensemble reste dans cette position pendant 14 millisecondes environ.
Pendant ce temps, une des cames de distribution à la réception (56) laisse tomber sur la première barre de l'emmagasineur le levier d'enregistrement (55) tiré par le ressort (2). Si l'armature est en position basse, c'est-à-dire pour une impulsion de travail, le levier d'enregistrement est retenu par la patte (3), la barre de l'emmagasineur ne peut être déplacée. Au contraire pour une impulsion repos, la patte (3) est soulevée et le levier d'enregistrement repousse la barre d'emmagasineur vers la gauche.
Les leviers d'enregistrement et de correction sont relevés simultanément chacun par leur came, laissant libre le mouvement de l'équipage mobile jusqu'au milieu de l'impulsion suivante. Le même processus se déroule pour les impulsions suivantes et dès la mise en place de la cinquième barre de l'emmagasineur, la came de déclenchement (53) fait pivoter le levier (7) qui agit sur (1) et 5.4-14 provoquant la mise en route de l'arbre de traduction. A partir de ce moment tout se passe comme nous l'avons indiqué pour la partie émission.
Durant le tour effectué par l'arbre de réception, la came de réarmement (51) déplace progressivement les leviers (50) et (52), le doigt (49) pousse ainsi le levier (44) vers la gauche ce qui se traduit finalement par l'encliquetage du levier (34) sur le bec de la pièce (33).
Pratiquement à la fin du tour, pendant l'impulsion stop qui maintient l'équipage mobile en position repos, la came de réarmement relâche le levier (52), le doigt (49) ne pousse plus le levier (44) mais le cliquet (11) est bloqué par le bec de l'équipage mobile. L'encliquetage est ainsi réalisé et le cliquet (45) arrête l'arbre de réception.
Il a été prévu un réglage du point de départ de l'arbre de réception, au moyen de l'index (43) ceci dans le but de parvenir au point de fonctionnement optimum. Quelle que soit la position de cet index, devant le secteur (42) l'effort de déclenchement demandé à l'électroaimant reste le même mais on change la position de repos de la came. Ainsi dans le cas où l'on s'aperçoit que le cliquet laisse partir l'arbre de réception trop tôt, l'index doit être déplacé vers le haut, et dans le cas contraire on le déplacera évidemment vers le bas.
Il nous reste à voir maintenant quelques points de détail qui ne sont pas à négliger toutefois puisqu'ils concernent l'inversion lettres/chiffres, l'avancement et le retour automatique du ruban, l'avancement et le retour du chariot et enfin l'interligne.
Inversion lettres/chiffres
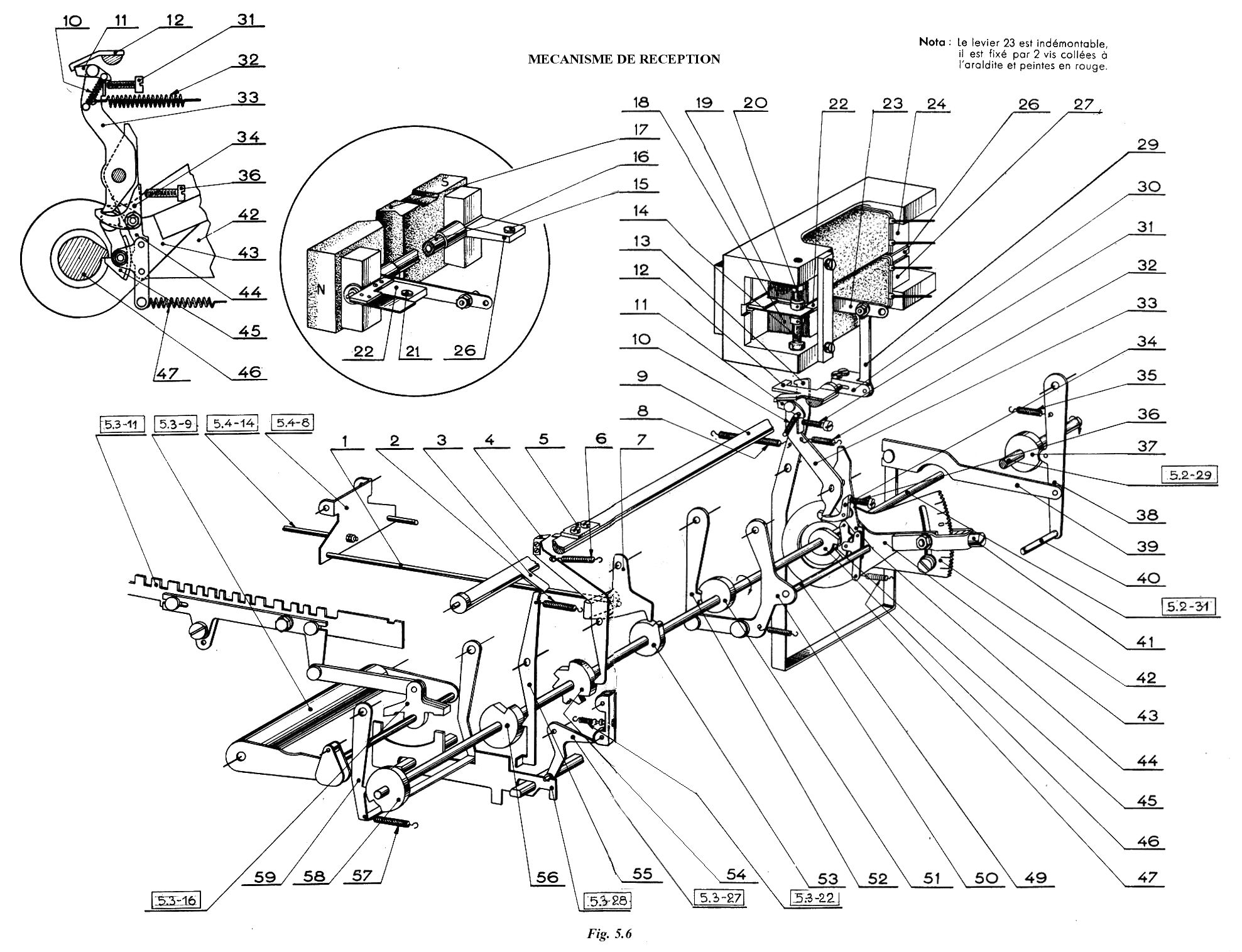 Pour ce point reportons-nous à la figure 5.5. L'ensemble des leviers porte caractères identiques
à (38) est monté sur un peigne circulaire (35) le tout formant la corbeille qui peut occuper
deux positions distinctes grâce à la suspension par parallélogramme articulé formée par deux
biellettes (19) et (24) fixées sur l'axe (18) à l'aide de clavettes, et par le levier
inférieur (36). En position haute, ce sont les lettres qui seront imprimées et en position basse évidemment les chiffres.
Pour ce point reportons-nous à la figure 5.5. L'ensemble des leviers porte caractères identiques
à (38) est monté sur un peigne circulaire (35) le tout formant la corbeille qui peut occuper
deux positions distinctes grâce à la suspension par parallélogramme articulé formée par deux
biellettes (19) et (24) fixées sur l'axe (18) à l'aide de clavettes, et par le levier
inférieur (36). En position haute, ce sont les lettres qui seront imprimées et en position basse évidemment les chiffres.
En permanence le ressort (14) agit sur le levier (12) solidaire de l'axe (18) ce qui a pour effet de tirer l'ensemble mobile vers le haut. La butée (13) détermine les deux positions du levier (12) qui est soumis à l'action de la biellette (10) solidaire du levier d'inversion (3) qui porte un galet (2) en appui sur la came d'inversion (1). Celle-ci est folle sur l'arbre de traduction et solidaire d'un maneton portant le cliquet (5) soumis à l'action du ressort à lame (7). A l'aplomb de ce cliquet se trouve fixé sur l'arbre de traduction le rochet (4) dont il est dégagé par l'une des butées (6) et (8) montées sur l'axe (11). Sur ce dernier est monté un maneton (15) qui possède un doigt susceptible d'être tiré vers l'avant sous l'action du levier chercheur (41) (correspondant à la combinaison lettres) tandis que la butée (8) porte un doigt qui sera tiré par le chercheur (42) (correspondant aux chiffres).
Supposons donc que la combinaison lettres vienne d'être traduite, le chercheur (41) est tiré en avant par le volet de traduction, celui-ci agit sur (17) qui pousse sur le doigt porté par (15), d'où pivotement de la butée (6). Le cliquet (5) se trouve libéré et il tombe sur le rochet (4) qui entraîne la came d'inversion (1). Après avoir effectué un demi tour le cliquet est dégagé du rochet lorsque sa queue vient heurter la butée (8) et la came d'inversion s'arrête.
Au cours de ce mouvement la corbeille remonte en position haute puisque tirée par le ressort (14) et ce sont les lettres qui se trouvent à hauteur de frappe.
Supposons maintenant que Ce soit la combinaison chiffre qui vienne d'être traduite, le chercheur (42) tire sur la butée (8) et le cliquet (5) est libéré. La came d'inversion est entraînée sur un demi tour par le rochet, le levier d'inversion (3) pivote, tire la biellette (10) vers le bas et par voie de conséquence la corbeille porte caractères va en butée inférieure. Ce sont alors les chiffres (ainsi d'ailleurs que les signes de ponctuations divers) qui viennent frapper sur le papier.
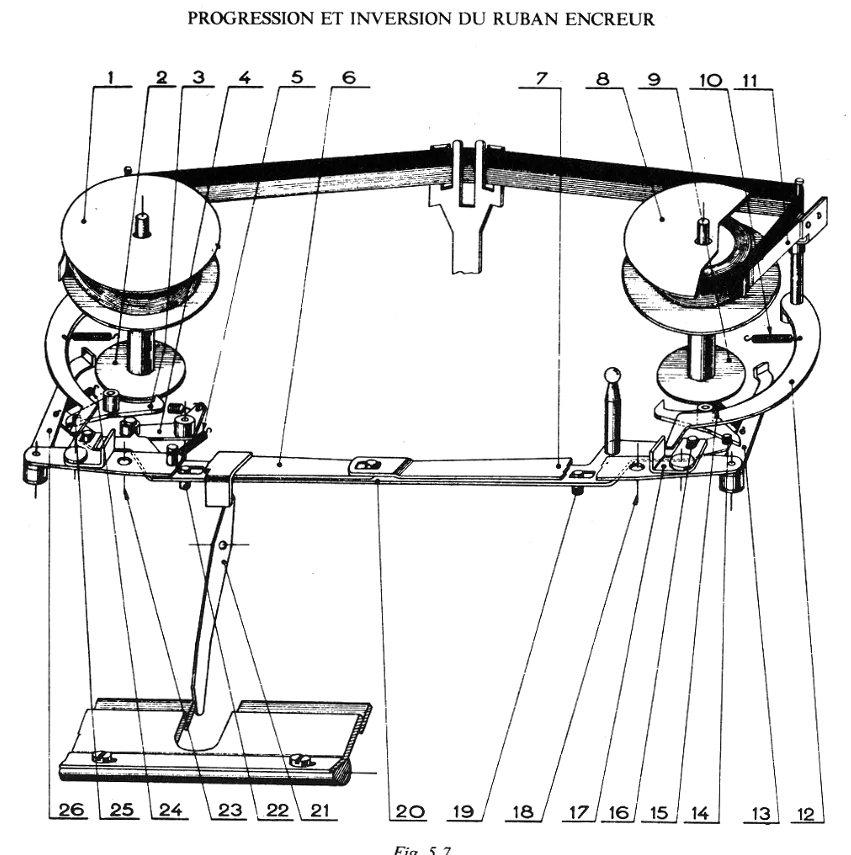
Avancement et retour automatique du ruban (fig. 5.7)
Le ruban doit se déplacer régulièrement chaque fois qu'un caractère est frappé, et le sens de déplacement doit s'inverser lorsque la bobine débitrice est vide afin qu'elle devienne la bobine réceptrice.
Les deux leviers (6) et (7) pivotent autour des axes (23) et (18) et s'entraînent mutuellement, tandis que le ressort (5) les tire vers l'arrière. Ces deux leviers portent les cliquets (26) et (13) tirés par les ressorts (24) et (15) vers les rochets (2) et (9). Le cliquet (13) est maintenu dégagé par le doigt (14) de la barre d'inversion (20), tandis que (26) est en prise avec (2).
La barre d'inversion peut se déplacer le long des deux guides (22) et (19) et le positionnement à droite ou à gauche est obtenu au moyen du galet sautant monté sur le bras (4). Pour faire fonctionner le système d'avancement automatique, on se sert du mouvement effectué pour chaque caractère par le volet de traduction. Le déplacement de celui-ci est en effet transmis par l'intermédiaire du bras mobile (21) au levier (6), ainsi le volet de traduction se déplaçant vers l'avant, le ressort (5) tire les bras (6) et (7) vers l'arrière et le cliquet (26) fait tourner le rochet (2) d'où enroulement du ruban sur la bobine (1). Quand le volet de traduction revient en arrière à sa position d'origine, les deux bras (6) et (7) reviennent vers l'avant et le cliquet (26) avance d'une dent sur le rochet (2) que le cliquet (3) retient.
La bobine (1) se remplissant cela suppose que la bobine (8) se vide et le palpeur (11) qui est toujours en contact avec le ruban puisque tiré par le ressort (10) amène l'extrémité du bras (12) au contact de la patte de l'équerre d'inversion (17) articulée sur le levier (7). Lorsque le ruban est presque entièrement déroulé pour un déplacement vers l'avant du'volet de traduction le bras (12) s'engage derrière la patte de (17) et quand le volet revient en arrière l'équerre (17) pivote et chasse la barre d'inversion vers la gauche. Le cliquet (26) et le cliquet de retenue (3) poussés par le doigt (25) abandonnent le rochet (2) tandis que le cliquet (13) et le cliquet de retenue lui correspondant viennent en prise avec le rochet (9). A partir de ce moment l'enroulement du ruban s'effectue sur la bobine (8).
Avancement et retour du chariot (fig. 5.8)
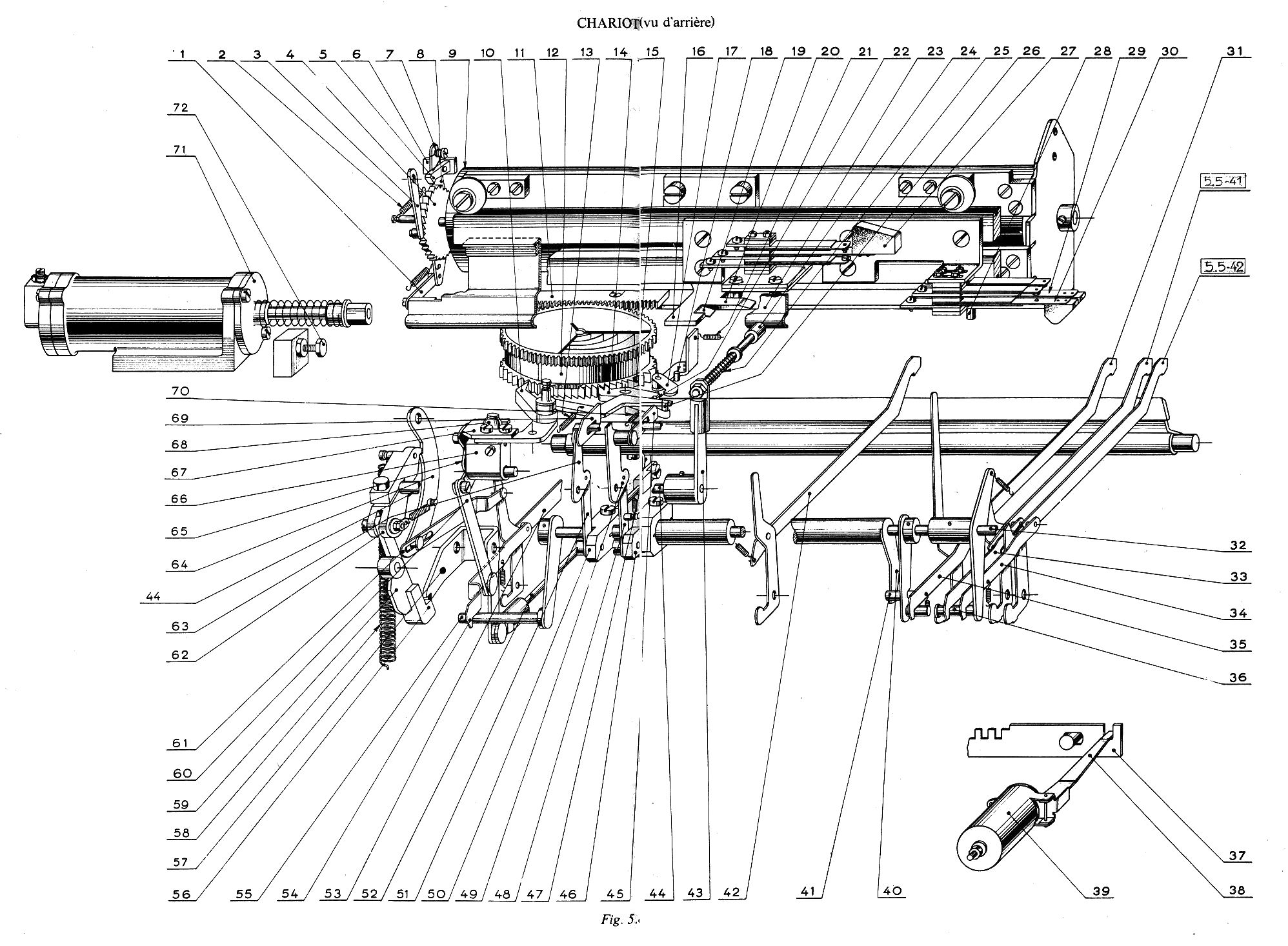 Considérons qu'une combinaison vient d'être traduite ce qui entraîne le mouvement
d'un chercheur (42). Le mouvement vers l'avant du volet de traduction est transmis
à un levier intermédiaire (57) par la patte (47) et la tringle (52). Ce mouvement est
transmis par la biellette (60) et le bras (65) au levier (66) qui porte un galet sphérique (68).
Le levier (67) dont l'extrémité enserre le galet doit suivre tous ses déplacements et dans ce cas un
mouvement de rotation dans le sens des aiguilles d'une montre lui est imprimé horizontalement.
Le cliquet mobile de progression (10) qu'il supporte recule d'une dent mais garde le contact du rochet
puisqu'il est tiré par le ressort (13). Le cliquet de retenue à deux dents (14) empêche le barillet (12) de revenir en arrière.
Considérons qu'une combinaison vient d'être traduite ce qui entraîne le mouvement
d'un chercheur (42). Le mouvement vers l'avant du volet de traduction est transmis
à un levier intermédiaire (57) par la patte (47) et la tringle (52). Ce mouvement est
transmis par la biellette (60) et le bras (65) au levier (66) qui porte un galet sphérique (68).
Le levier (67) dont l'extrémité enserre le galet doit suivre tous ses déplacements et dans ce cas un
mouvement de rotation dans le sens des aiguilles d'une montre lui est imprimé horizontalement.
Le cliquet mobile de progression (10) qu'il supporte recule d'une dent mais garde le contact du rochet
puisqu'il est tiré par le ressort (13). Le cliquet de retenue à deux dents (14) empêche le barillet (12) de revenir en arrière.
Lorsque le volet de traduction revient en arrière il provoque la rotation du barillet d'une seule dent, et le mouvement est transmis au chariot au moyen de la crémaillère (11) fixée sur celui-ci.
Un ressort à l'intérieur du barillet emmagasine durant le déplacement du chariot l'énergie nécessaire au retour de celui-ci lorsque la combinaison retour chariot est traduite. Cette combinaison correspond au chercheur (31) sur lequel est articulé le levier d'accrochage (35). Lorsque le volet de traduction est tiré vers l'avant, le mouvement du chercheur (31) est transmis à l'axe (32) qui pivote et permet de dégager le cliquet mobile (10) par l'intermédiaire du poussoir (69) commandé par les leviers (50) et (63) reliés par la biellette (51).
Dans le même temps le doigt (41) rivé sur (35) entraîne les leviers (40) et (46) solidaires l'un de l'autre mais qui sont libres sur l'axe (32) et qui transmettent leur mouvement par l'intermédiaire du levier (49) et de la biellette (48) au poussoir (45) qui dégage le cliquet de retenue (14). Le bec (22) vient s'encliqueter sur le crochet (17) qui est maintenu au contact de la butée (18) par le ressort (21).
Les deux cliquets (14) et (10) sont maintenus dégagés et le barillet libéré ramène rapidement le chariot à son point de départ (vers la gauche de la figure).
Dans la dernière partie de son mouvement de retour le chariot est freiné progressivement jusqu'à l'arrêt complet qui a lieu au contact de la patte (16) contre la butée (72) amorti par un système dash pot (71).
Dans les derniers millimètres du mouvement de retour, la butée (28) montée sur le chariot s'appuie sur la queue du crochet (17) qui pivote et lâche ainsi les deux cliquets qui retombent sur le rochet puisque tirés par leurs ressorts de rappel (13) et (10).
Interligne
Lors de l'apparition d'une combinaison interligne, le chercheur (53) est tiré vers l'avant par le volet de traduction. Comme l'interligne ne doit pas s'accompagner d'un déplacement du chariot, le levier d'accrochage tire sur le doigt (55) qui fait pivoter l'axe (32) et le cliquet de progression (10) est dégagé de la même manière que nous l'avons vu précédemment.
En même tempsja biellette (61) tire sur le levier (64) dont le cran abandonne le bec du bras (62) et Sous l'action du ressort (58) l'axe (44) pivote. Il fait avancer le poussoir (24) (qui est toujours en contact avec la plaque (23) par l'intermédiaire du bras (43) et du ressort (25).
Au repos le cliquet (5) qui est maintenu dégagé par la butée (6) permet de manœuvrer le rouleau à volonté. Le bras porte cliquet (8), libre sur l'axe du rouleau, est sensible au mouvement de la plaque (23) par l'intermédiaire de la biellette (1). Le cliquet (5) tombe sur le rochet sous l'action du ressort spiral (7) et le fait avancer d'une dent.
C'est le bras porte galet (3) constamment en appui sur le rochet (4) à l'aide du ressort (2) qui assure le positionnement angulaire du rouleau.
Lorsque le volet de traduction est tiré au maximum vers l'avant les différentes pièces du mécanisme d'interligne sont dans les positions suivantes : le levier (57) est en position haute et le crochet (56) a été tiré vers le haut et renvoyé vers la droite par la rampe (59) qui porte un galet. Lorsque le volet effectue son mouvement de retour le bec du levier (57) s'abaisse et accroche (56) qu'il tire vers le bas et le ressort (58) se tend jusqu'à ce que le bec du bras (62) vienne s'encliqueter dans le cran du levier (64).
Nous venons de passer en revue les différentes fonctions essentielles du téléimprimeur Sagem SP5, comme nous l'avons indiqué précédemment, les appareils fabriqués par Télétype, Siemens, Olivetti etc... ne possèdent pas une mécanique identique à celui que nous avons décrit, mais nous pensons qu'à partir des éléments fournis dans cette étude, et un peu de recherche personnelle chacun doit pouvoir venir à bout de tout problème rencontré sur un téléimprimeur de la même génération.
Nous avons ajouté (figures 5.9 et 5.10) le schéma électrique et le plan de câblage du téléimprimeur, ceux-ci ne demandent pas de commentaires particuliers mais nous sommes à la disposition de ceux de nos lecteurs qui auraient une quelconque difficulté.
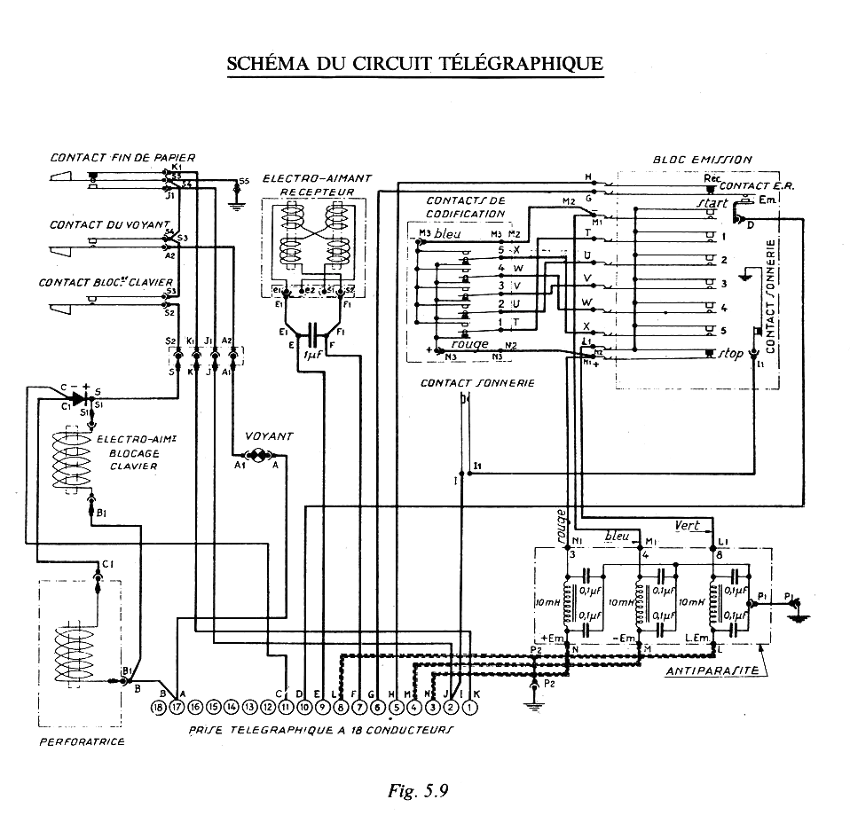
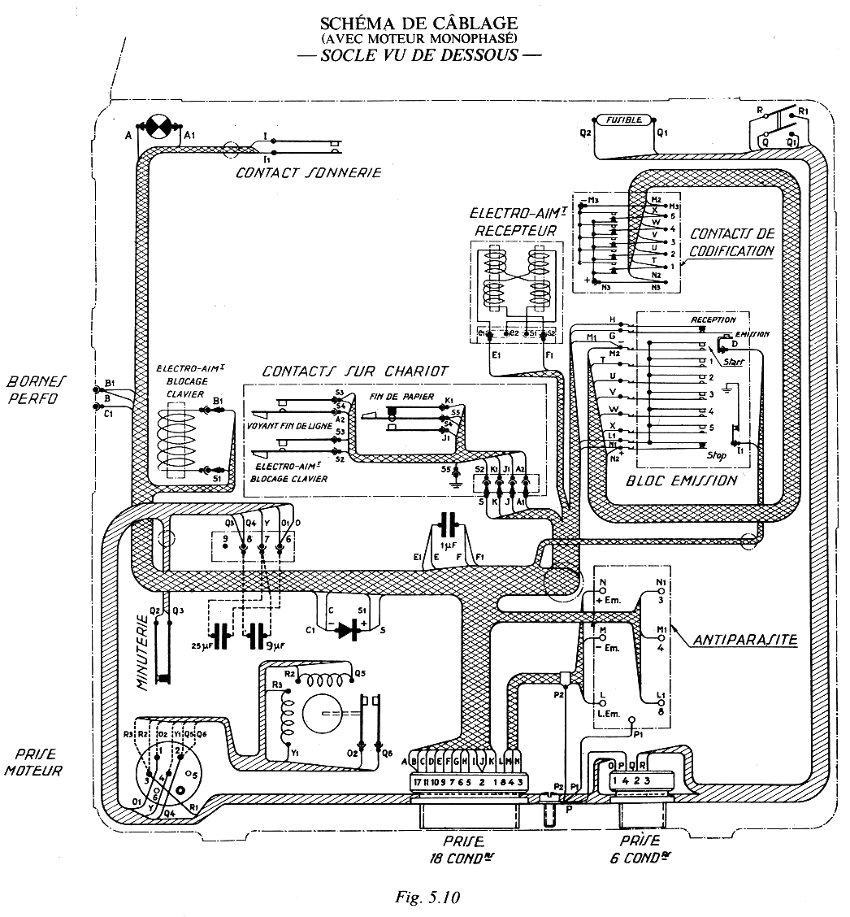
Imprimerie Marcel Bon
70001 Vesoul
Dépôt légal 2e trimestre 1976 N° Éditeur : N° 148 - Imprimeur : 2059