Présentation
Cette page présente différents capteurs destinés à des chronocomparateurs utilisés pour le réglage des montres ou pendules mécaniques (pour les chronocomparateurs, voir PC-RM4 (pour montres et horloges), PC-RM5 (pour horloges), PC-RM1 (pour montres), PC-RM3 (pour montres, obsolète)).
Le codage des noms suit la règle suivante : PC-RM2-{PZ, MIC, EM, OPT}-[A]-[N°] avec PZ pour Piezo, MIC pour microphone, EM pour électromagnétique, OPT pour optique, A pour Amplifié. N° est le n° du capteur dans la série. Ainsi, PC-RM2-PZ-A-1 signifie qu'il s'agit d'un capteur utilisant un élément piezo et disposant d'un amplificateur. C'est par ailleurs le premier de la série.
INFORMATIONS CONNEXES
Chronocomparateur PC-RM4
Chronocomparateur PC-RM1
Chronocomparateur PC-RM5
Principe des montres mécaniques
APERÇU DES CAPTEURS
| PC-RM2-PZ-A-1 et PC-RM2-PZ-1 |
|
Capteur piezo amplifié et non amplifié. |
| PC-RM2-PZ-2 |

|
Capteur piezo. |
| PC-RM2-PZ-3 |

|
Capteur piezo à pince crocodile. |
| PC-RM2-PZ-A-4 et PC-RM2-PZ-4 |

|
Capteur piezo amplifié ou non amplifié en impression 3D. |
| PC-RM2-MIC-A-1 |

|
Capteur à microphone. |
| PC-RM2-OPT-1 |

|
Capteur optique infrarouge faible coût. |
| PC-RM2-OPT-2 |
|
Capteur optique pour le réglage des mouvements de pendules de Paris (ou autres moyennant adaptation mécanique). |
| PC-RM2-OPT-3 |

|
Capteur optique en impression 3D pour le réglage des mouvements des horloges à balancier. |
DÉTAIL DES CAPTEURS
Capteur piezo amplifié ou non amplifié pour montres
Principales caractéristiques
- Capteur piezo dans un boitier en aluminium. La transmission des chocs se fait via une liaison mécanique.
- Amplificateur intégré délivrant un signal haut niveau basse impédance pour PC-RM2-PZ-A-1
- Boitier métal limitant les interférences avec l'environnement
PC-RM2-PZ-1 est utilisable avec les chronocomparateurs PC-RM1, PC-RM3 et PC-RM4.
PC-RM2-PZ-A-1 est utilisable avec le chronocomparateur PC-RM4 car j'ai prévu une entrée pour un capteur amplifié. Rien n'empêche de faire de même pour les autres chronocomparateurs.
Principe du capteur de PC-RM2
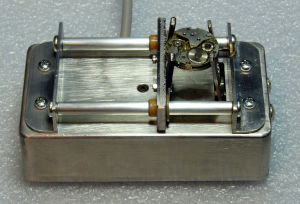
Le capteur se présente sous la forme d'un boitier en aluminium massif sur lequel se trouve des rails sur lesquels coulisse un chariot avec son presseur de montre.
Ce presseur est en vis-a-vis d'un autre presseur fixe qui traverse le boitier. C'est ce presseur qui récupère la vibration du Tic-Tac de la montre et la transmet à un élément piezo-électrique.
Dans PC-RM2-PZ-A-1, cet élément est connecté à un amplificateur (proche de celui qui se trouve dans les différents chronocomparateurs présentés sur ce sitede. Le signal est ensuite transmis à un équipement de mesure.
Dans PC-RM2-PZ-1, le signal de l'élément piezo est directement transmis à un chronocomparateur sans amplification.
Je vois deux avantage par rapport au capteur PC-RM1 :
- La montre à mesurer n'a pas à s'appuyer directement sur l'élément piezo ce qui limite le risque de casse de cet élément.
- L'élément piezo est positionné de manière optimale quelque soit l'épaisseur de la montre.
PC-RM2-PZ-A-1 est relié à l'équipement de mesure par 3 fils :
- Une masse
- Une alimentation de 5V pour PC-RM2-A.
- Une ligne pour le signal capté.
Pour PC-RM2-PZ-1, l'alimentation est supprimée.
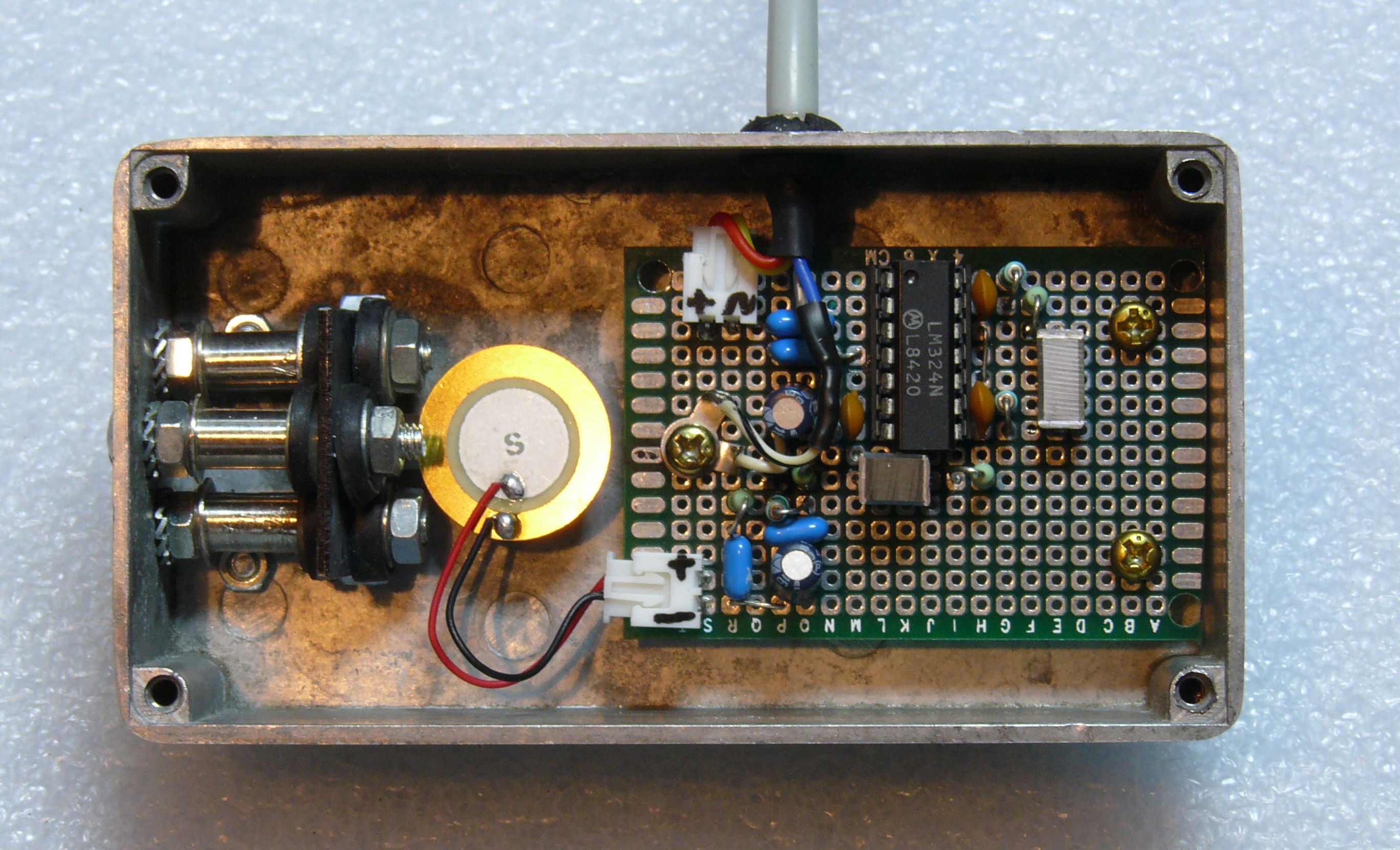
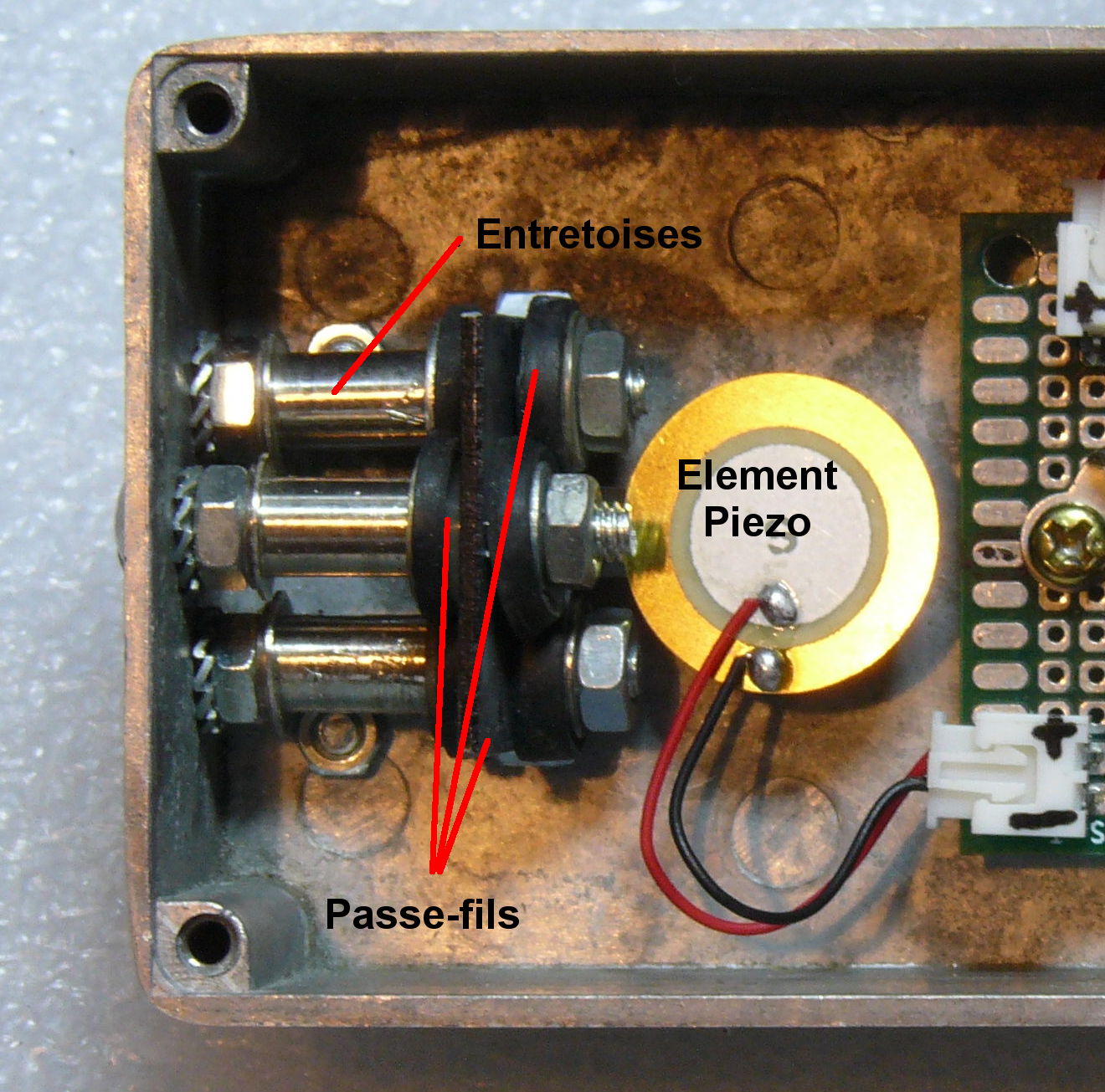
Vue de l'intérieur du boitier de PC-RM2-PZ-A-1.
Dans PC-RM2-PZ-1, l'amplificateur est supprimé. Le boitier est quasiment vide...
Conseils de réalisation
Boitier et chariot
Je passe rapidement sur le boitier et le chariot mobile. J'ai utilisé des tubes de 6mm en aluminium pour les rails. Le chariot est simplement une plaque d'aluminium épaisse. On peut voir des tubes en plastique entre le chariot et les rails : ils sont là pour rallonger la surface de contact et éviter que le chariot se grippe sur les rails. Accessoirement, le frottement est suffisant pour que les montres soient bien tenues sans qu'il y ait besoin de bloquer le chariot par un élément quelconque : Au début de la conception, j'avais envisagé de mettre des ressorts pour que le presseur mobile soit poussé vers le presseur fixe mais finalement, c'est inutile.
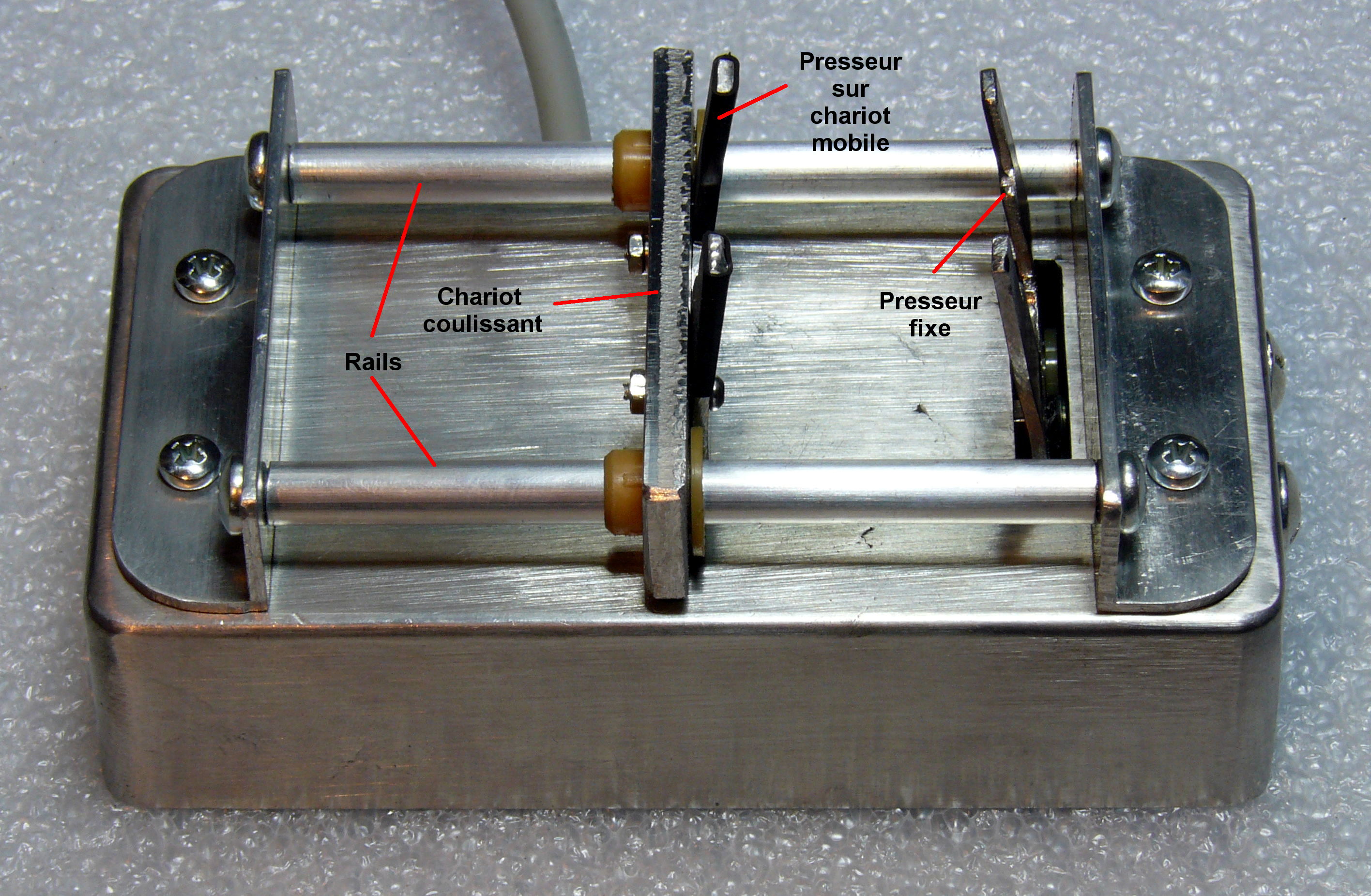
Vue du chariot et des presseurs
Presseur fixe
Le presseur fixe traverse le boitier. La partie supérieure permet, avec le presseur mobile, de maintenir la montre, la partie inférieure porte l'élément piezo.
Le rôle de ce presseur est de transmettre l'infime vibration créee par la montrée à l'élément piezo.
Je ne sais pas si c'est vraiment utile mais pour cette fonction, j'ai préféré choisir de l'acier dur (dont on fait les cornières par exemple).
Ce presseur doit être fixé au boitier. Sur les matériels professionnels, il y a toujours un isolant entre le presseur et le boitier. Je suppose qu'il sert à isoler le presseur des vibrations parasites de l'environnement.
Ne sachant pas très bien si ce phénomène était vraiment gênant, j'ai fait comme dans les matériels professionnels. Le presseur est fixé par trois boulons formant un triangle dont une pointe est en bas (la base du triangle est en haut).
Les têtes des boulons sont sur le boitier. Les vis passent à travers le presseur fixe via des passe-fils en caoutchouc, le tout étant maintenu avec des écrous et des entretoises.
A noter que j'ai mis du 4mm parce que je n'avais que ça sous la main dans la longueur souhaitée. Du 3mm est largement suffisant et plus logeable.
Sur la partie inférieure du presseur est vissé une entretoise en acier de longueur "suffisante". L'élément piezo est collé sur cette entretoise. Pour avoir de bons résultats de mesure, il est important que l'extrémité de l'entretoise arrive vers le centre du capteur.
Vue du chariot et des presseurs
Circuit amplificateur pour PC-RM2-PZ-A-1
J'ai utilisé une plaquette à trous de 6x4cm qui s'avère largement suffisante en surface. Il y a même une réservation pour une extension (par exemple, mettre une LED pour signaler que capteur est sous tension et une autre LED pilotée par un transistor pour indiquer la détection d'un signal).
Le point auquel il faut prêter attention est que tous les fils volants doivent, soit être maintenus (avec de la colle ou autre), soit être positionnés de telle sorte qu'ils ne viennent pas frotter contre quelque chose. Dans le cas contraire, ils risquent de générer des chocs qui viendront perturber les mesures : le capteur est vraiment très sensible ! Ce point est particulièrement vrai pour les fils qui relient l'élément piezo au circuit.
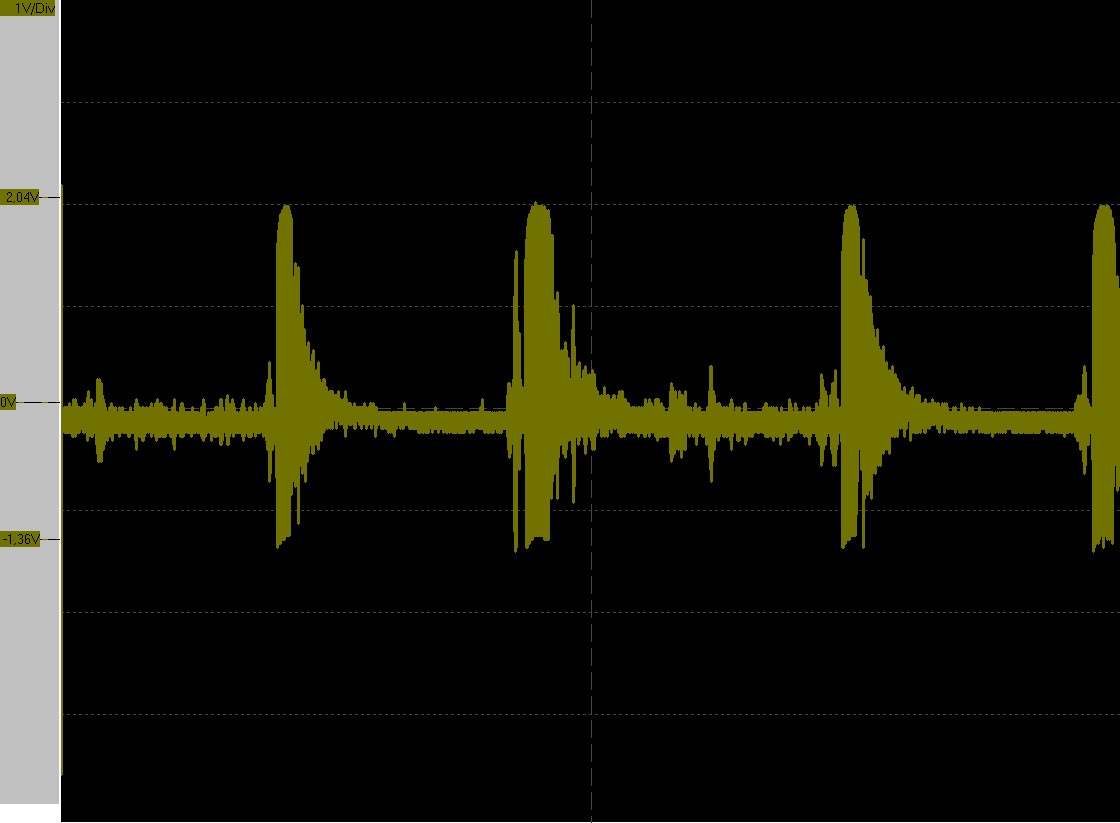
A propos de sensibilité, voici ce que donne la sortie du capteur avec le mouvement (LORSA 237B) qui me sert pour les tests :
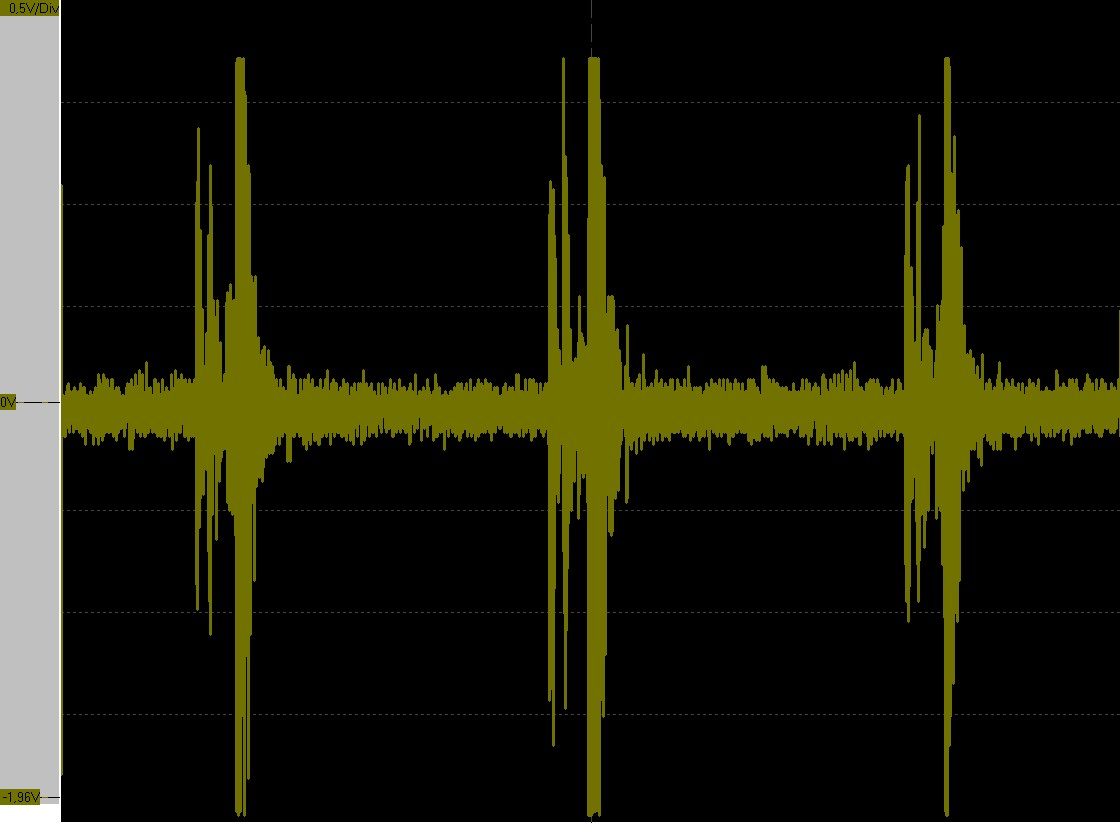
Trace en sortie de l'amplificateur de PC-RM2-PZ-A-1 (date de 2018. A l'époque, je n'avais pas mis de condensateur en sortie du préampli).
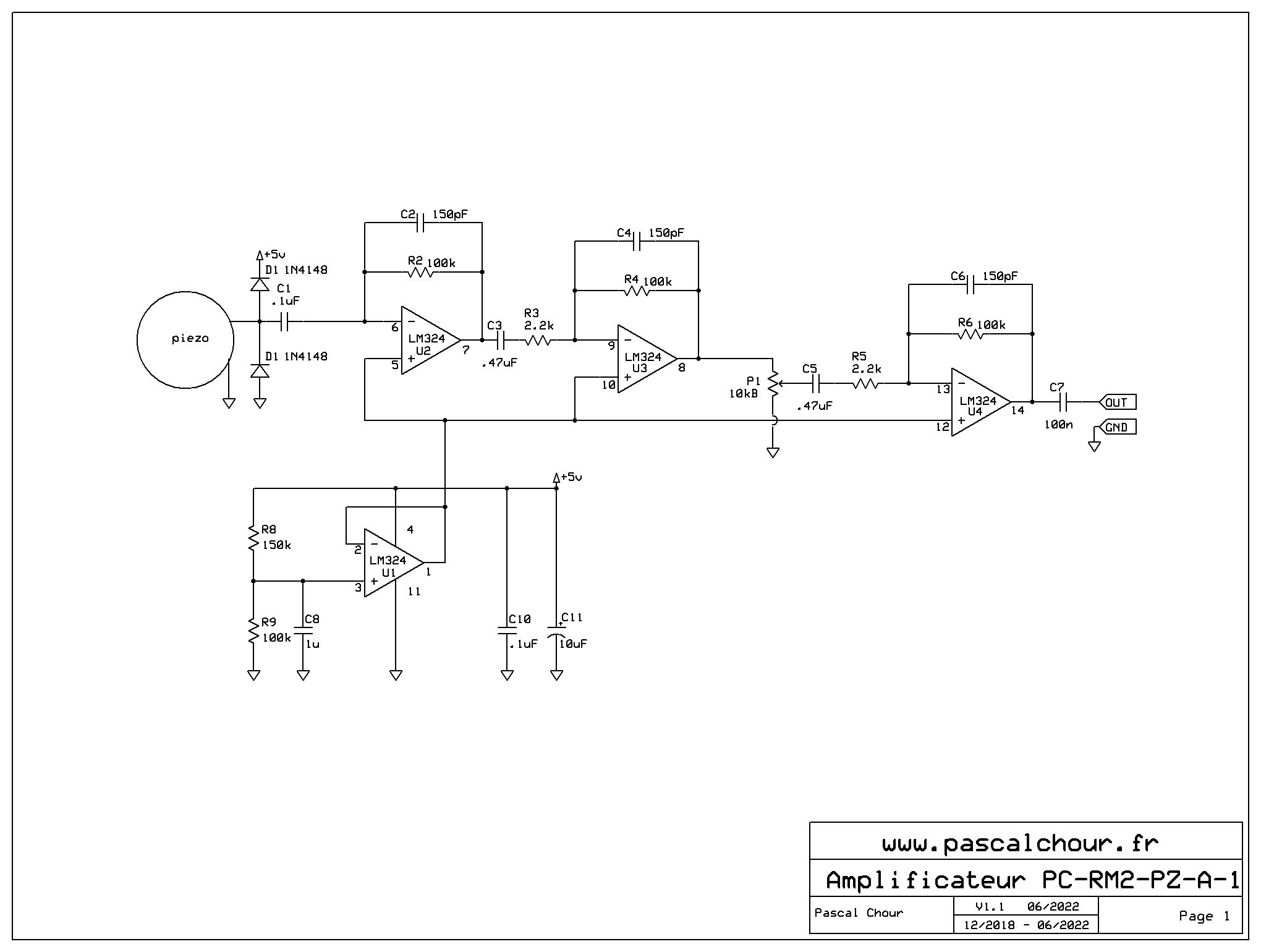
Le schéma de l'amplificateur est inspiré de celui qui se trouve sur le site www.watchoscope.com/. Les principales différences sont les suivantes :
- Contrôle de volume amélioré pour éviter la saturation du dernier ampli-op.
- Diodes en entrée pour éviter les risques de surtension en entrée de l'ampli-op.
- Utilisation d'un LM324 au lieu d'un TL074 ce qui permet d'alimenter le montage en 5V.
- Suppression de la 33k en entrée qui à mon avis ne sert à rien.
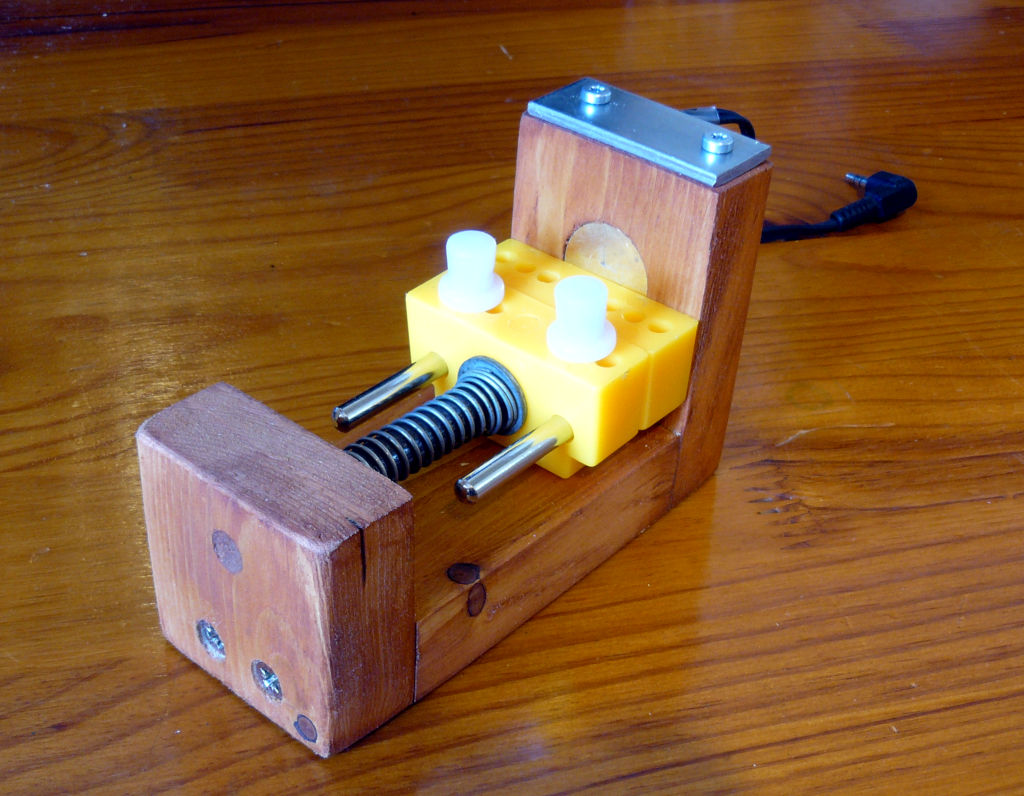
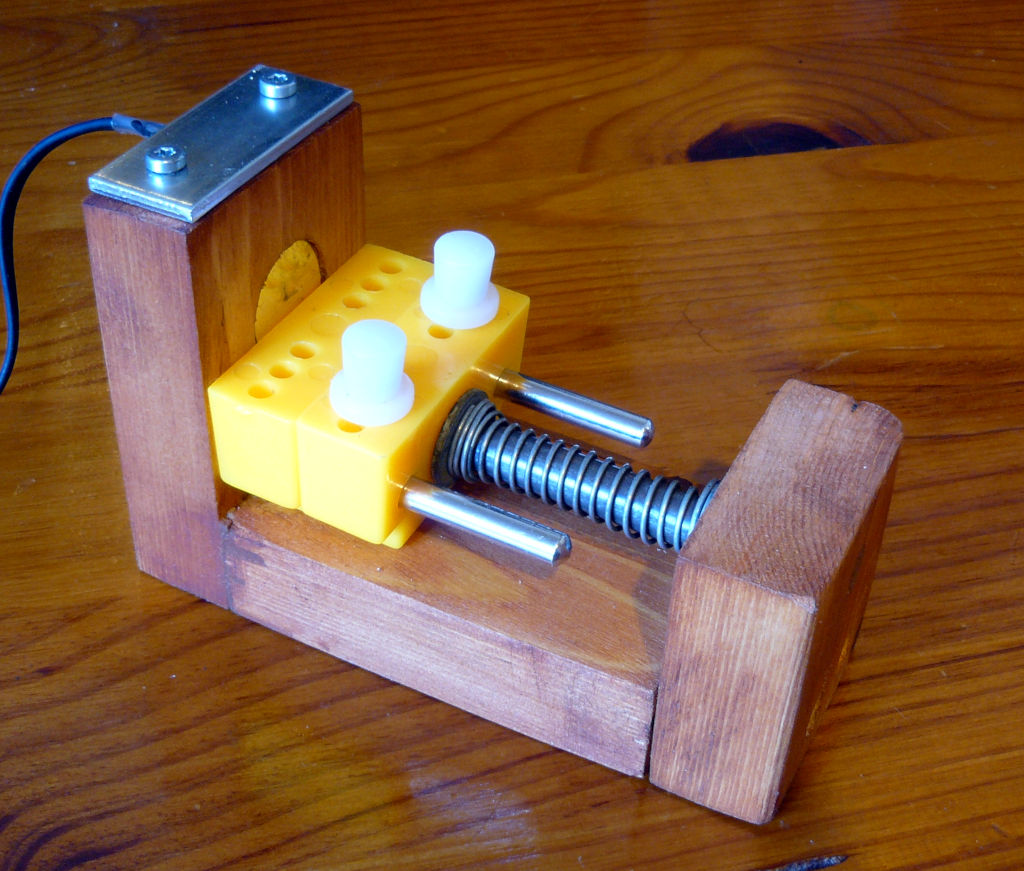
Capteur piezo économique non amplifié pour montres
Lorsque j'ai réalisé PC-RM1, j'ai du me bricoler rapidement un capteur pour les essais. On trouve un photo de ce capteur sur la page dédiée à PC-RM1.
Ce n'était pas joli-joli et j'ai donc décidé de le transformer pour qu'il soit plus présentable. Entre-temps, il a pris du poids...
Principales caractéristiques
- Structure en bois. J'ai pris ce que j'avais dans mon stock. On peut faire beaucoup moins gros...
- Utilisation d'un étau à montre modifié, en matière plastique (coût aux alentours de 2€ en 2018).
- Capteur piezo sur lequel le mouvement vient directement s'appuyer.
Principes de réalisation.
L'étau standard est muni d'une vis pour éloigner ou rapprocher les machoires. Un ressort entre les deux machoires permet à la machoire mobile coulissante de s'écarter de la machoire fixe.
Dans le cas présent, la machoire mobile devient la machoire fixe. La vis est supprimée. Le trou par lequel passait la vis dans l'ancienne machoire fixe (qui est devenue la machoire mobile) est agrandi de façon à lui permettrere de coulisser sur un tube creux de 8mm de diamètre.
Ce tube s'appuie, d'un côté sur la machoire fixe et de l'autre côté, sur un élément en bois. Entre l'élément en bois et la machoire mobile, sur le tube, un ressort est mis en place. Ainsi, la machoire mobile plaque la montre dont on mesure le mouvement sur la machoire fixe et le capteur piezo.
Le disque piezo est logé dans un trou (20mm). Derrière le disque se trouve une mousse qui permet d'absorber la pression de la montre lorsqu'elle vient s'appuyer sur l'élément piezo.
Avantages (+) et inconvénients (-)
- (+) Très faible coût. Si vous êtes un peu bricoleur, le seul élément spécifique est l'étau (environ 2€).
- (+) Très grande facilité de réalisation.
- (+) Structure en bois et plastique sans risque pour les montres.
- (+) Très bonne sensibilité, provenant peut-être du fait que la montre est directement plaquée sur le capteur.
- (-) La montre s'appuie directement sur le disque piezo. Il y a un risque de le casser. Une amélioration possible (non testée) serait de mettre une petite plaque en métal fixée sur le bâti là où il y a l'ouverture pour le disque piezo, ce disque étant collé à cette plaque. Ca devrait fonctionner.
- (-) L'élément piezo peut capter des bruits environnants du fait qu'il se trouve à l'air libre ce qui est moins le cas d'un disque piezo complètement enfermé.
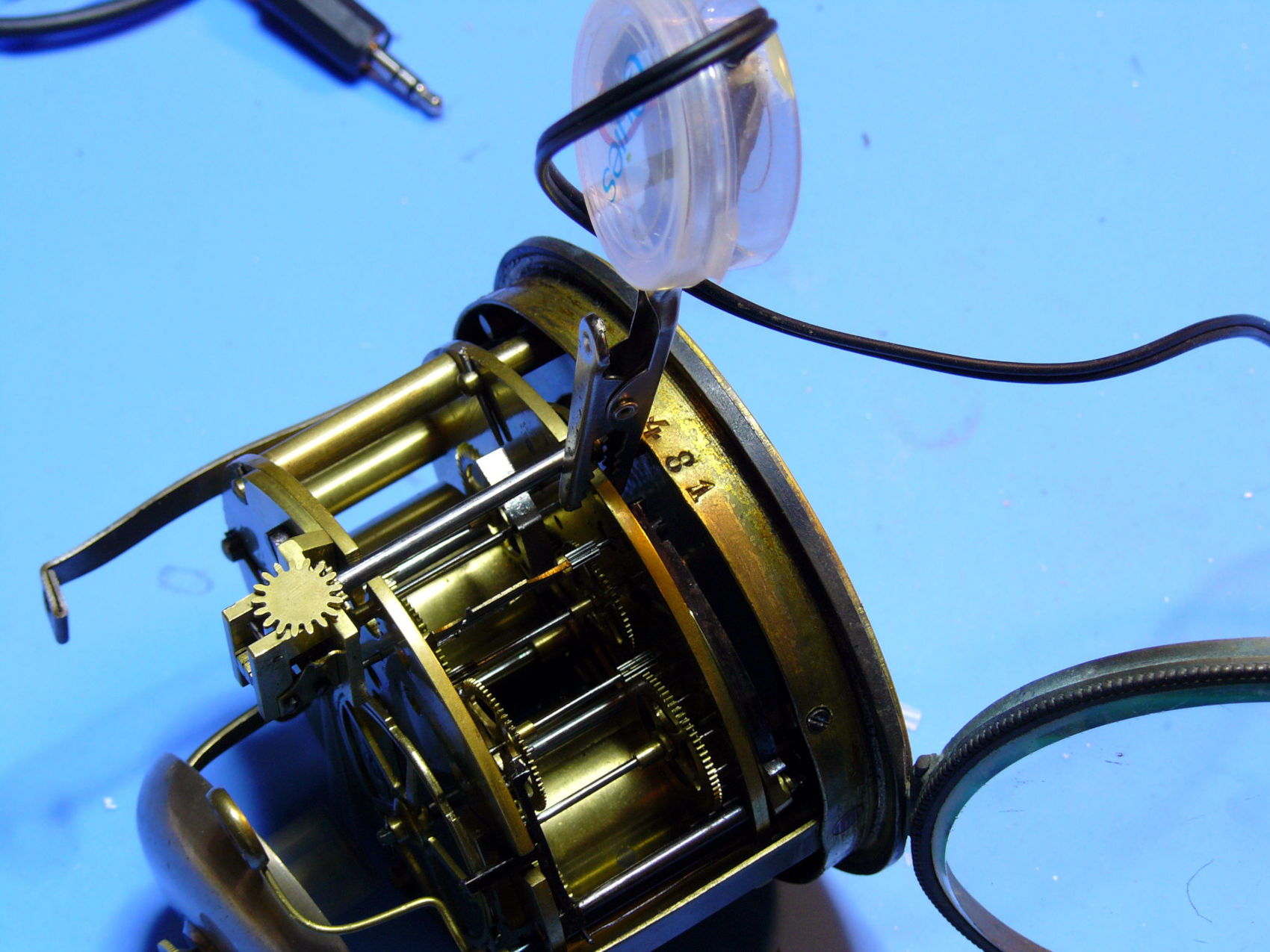
Capteur piezo à pince crocodile
Ce capteur piezo sans amplification est destiné à fonctionner avec le chronocomparateur PC-RM4 et les chronocomparateurs qui disposent d'une entrée pour un capteur externe.
L'idée est de disposer d'un capteur très simple à mettre en oeuvre sur des mouvements de formes variées : une pince crocodile permet de prendre la mesure, en la fixant sur le remontoir ou sur la platine d'une pendule par exemple.

Principales caractéristiques
Comme pour les autres capteurs piezo, l'idée est de détecter les chocs produits dans le mécanisme (les chocs liés à la régulation) et de les transformer en signal électrique. Dans le cas présent, les chocs sont captés par la pince crocodile qui transmet l'onde de choc au capteur piezo. Le capteur génère un signal (très faible) qui est ensuite amplifié pour qu'il soit utilisable par le processeur (ou autre) du chronocomparateur.
La sensibilité de l'ensemble n'est pas très bonne mais c'est sans doute une histoire de construction. J'ai fait ce modèle sans prendre de grandes précautions, on doit pouvoir faire mieux.
Toujours est-il qu'il m'a servi pour le réglage des pendules et dans ce contexte, il s'avère très pratique. On voit ci-après le capteur dont la pince crocodile est mise sur la platine d'un mouvement de Paris.
Et voici le signal résultant en sortie du chronocomparateur PC-RM4.
Si l'on connait le nombre idéal de battements par heure de la pendule, on peut à la fois procéder à son réglage et à l'équilibrage du Tic et du Tac.
Finalement, je trouve cela plus pratique qu'un capteur optique car il n'y a aucun réglage particulier à faire pour prendre la mesure.
Principes de réalisation.
Pour la construction de ce modèle :
- le matériel comporte une pince crocodile, une entretoise de section hexagonale comportant une vis à une extrémité, un élément piezo, une petite boite en plastique qui vient de je ne sais où, un câble blindé terminé par une prise Jack (ici, le câble et la prise proviennent d'un écouteur pour smartphone...).
- L'entretoise est collées au fond de la boite, sachant que la vis sort de la boite.
- Collez l'élément piezo sur l'entretoise (sur la face opposée à celle qui est collée sur le fond de la boite).
- Insérez en force la vis de l'entretoise dans le tube de la pince crocodile.
- Soudez le - de l'élément piezo à la tresse du câble et le + de l'élément piezo au fil qui va à l'extrémite de la prise Jack.
- Assurez vous que les fils ne se balladent pas dans la boite (collez les sur un bord par exemple).
Avantages (+) et inconvénients (-)
- (+) Très faible coût. Peut-être 2 ou 3€ sachant qu'une bonne partie de la réalisation peut provenir d'éléments de récupération.
- (+) Très grande facilité de réalisation.
- (+) Faible encombrement.
- (+) Peut se fixer quasiment n'importe où.
- (-) Sensibilité moyenne. Une fabrication plus soignée doit permettre d'améliorer ce point. Mais pour les pendules, la sensibilité est plus que suffisante.
Capteur piezo amplifié ou non en impression 3D
Ce capteur piezo avec ou sans amplification est destiné à fonctionner avec le chronocomparateur PC-RM4 et les chronocomparateurs qui disposent d'une entrée pour un capteur externe.
Comme la réalisation comporte de nombreux éléments (ne serait-ce que les fichiers pour l'impression 3D et le schéma d'un amplificateur), il bénéficie d'une page d'explication dédiée.

Avantages (+) et inconvénients (-)
- (+) Faible coût si on est déjà équipé en impression 3D.
- (+) Assez facile à réaliser.
- (+) Très conventionnel (ressemble aux autres capteurs de sa catégorie, le support en moins).
- (-) Il faut disposer d'une imprimante 3D.
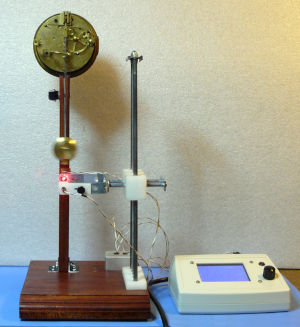
Capteur microphonique amplifié pour montres
PC-RM1 dispose d'un capteur microphonique intégré dans son boitier. Pour les autres chronocomparateurs, ce n'est pas le cas. J'ai donc bricolé ce capteur microphonique externe pour PC-RM4 et les chronocomparateurs qui disposent d'une entrée pour un capteur externe.

Principales caractéristiques
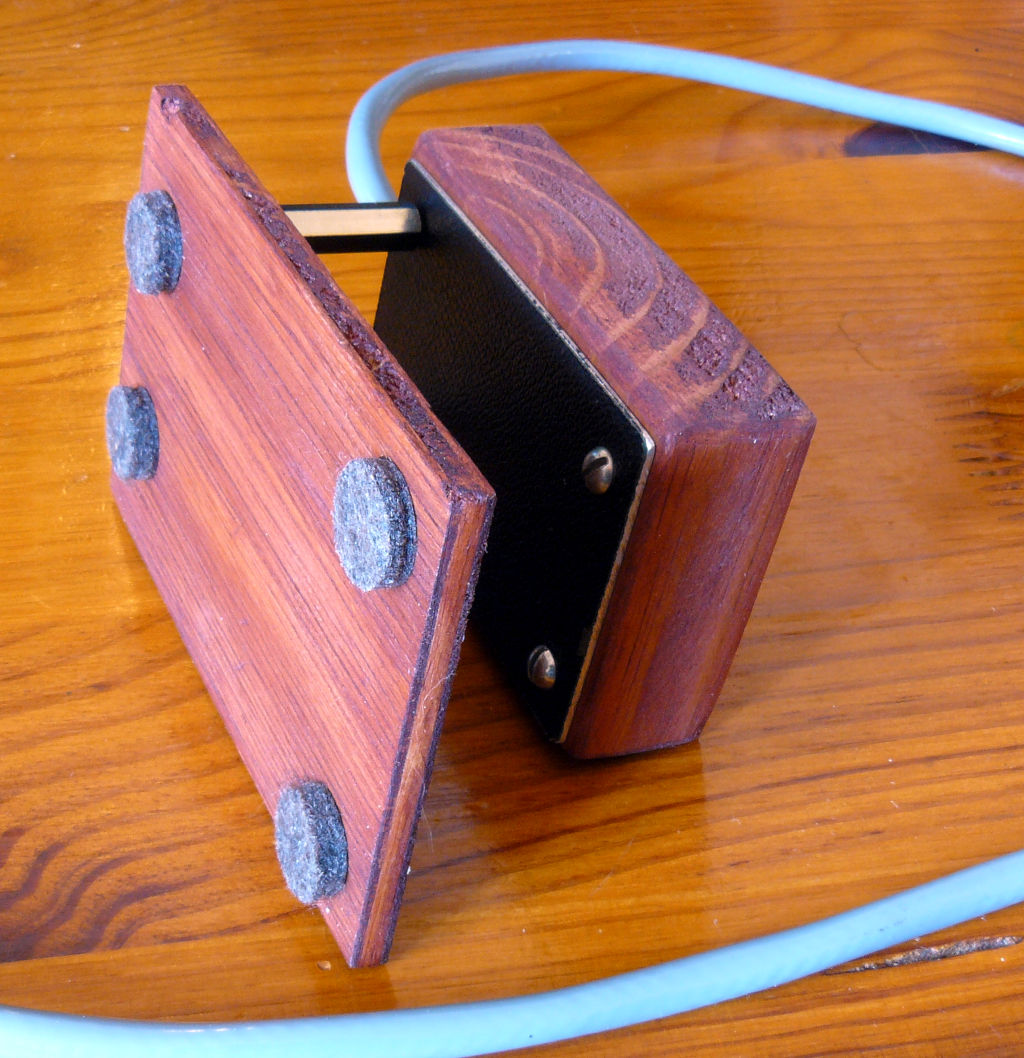
Comme son nom l'indique, PC-RM2-MIC-A-1 est un capteur microphonique amplifié. Le microphone electret et son amplificateur sont logés à l'intérieur d'une plaque épaisse en bois. Cette plaque permet de supporter la montre ou le mouvement que l'on veut mesurer et a une hauteur suffisante pour qu'on ne soit pas obligé de retirer le bracelet.
Principes de réalisation.
Pas grand chose à dire, voir les photos.
Avantages (+) et inconvénients (-)
- (+) Très faible coût. Si vous êtes un peu bricoleur, le seul élément spécifique est le microphone avec son ampli (environ 2€).
- (+) Très grande facilité de réalisation.
- (+) Structure en bois sans risque pour les montres.
- (-) Sensibilité moyenne. Il faut que la montre fasse du bruit.
- (-) Le pied que j'ai mis est trop léger. Préférer un pied en métal assez lourd.
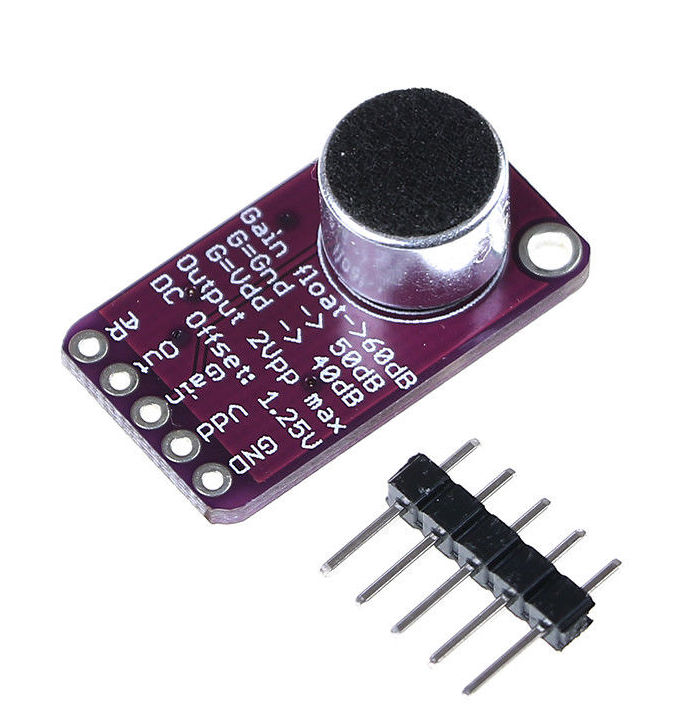
Le microphone utilisé
Capteur optique IR pour pendules à balancier (LTH-301-32)
Ce capteur est destiné à fonctionner avec le chronocomparateur PC-RM4 ou PC-RM5 et les chronocomparateurs qui disposent d'une entrée pour un capteur externe.
L'objectif est de permettre le réglage de pendules ou d'horloges dans lesquelles il y a un organe de régulation relativement lent et assez volumineux : un balancier d'une pendule ou d'une horloge, le balancier d'une pendule Atmos, etc.
Celui présenté ici est un capteur plutôt destiné à des pendules dont le balancier se termine par une tige assez fine (2mm de diamètre typiquement). Cette tige qui se balance va passer périodiquement dans le capteur en forme de U et couper un faisceau infrarouge. Ce sont ces coupures qui sont détectées par le chronocomparateur.
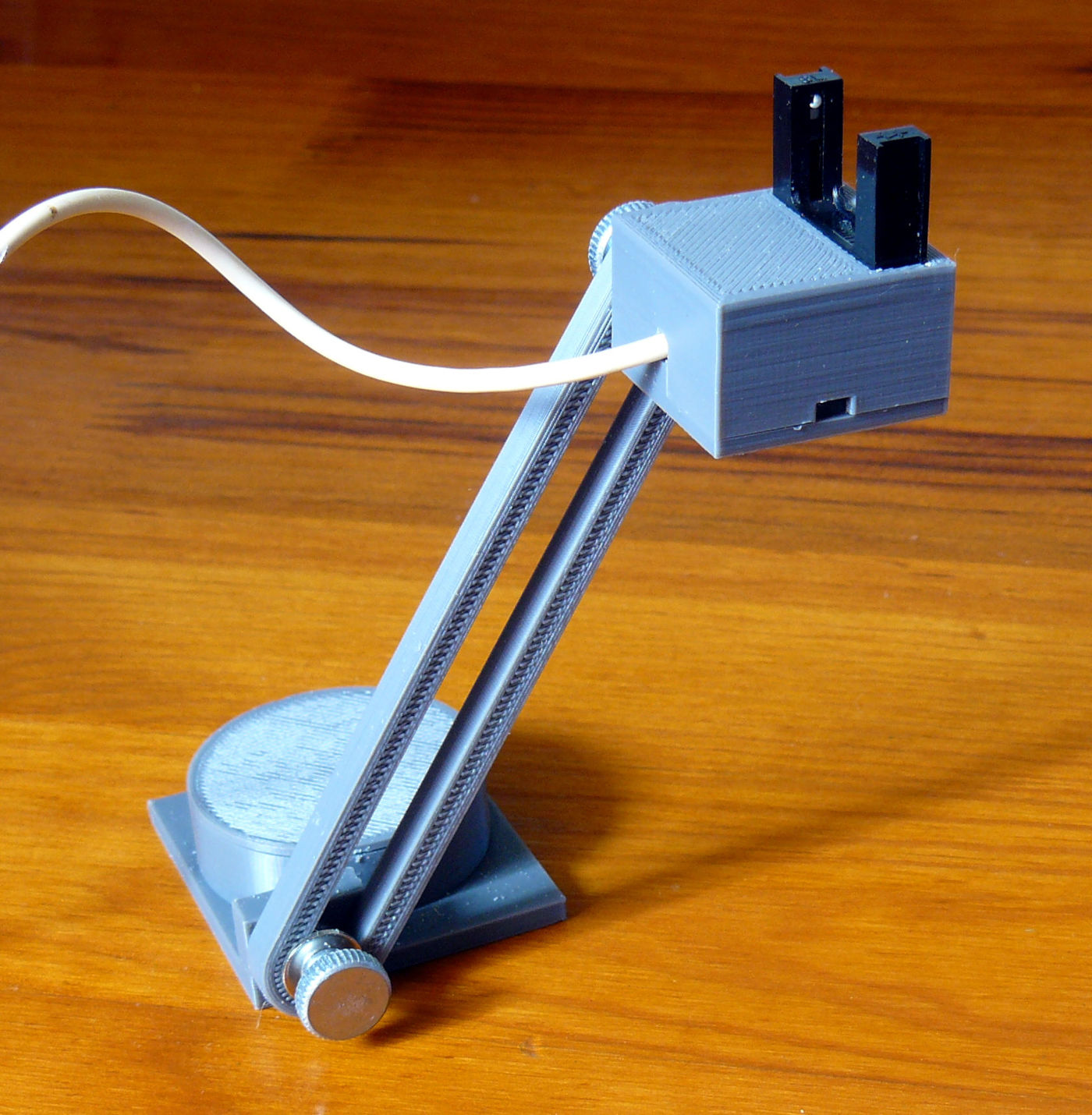
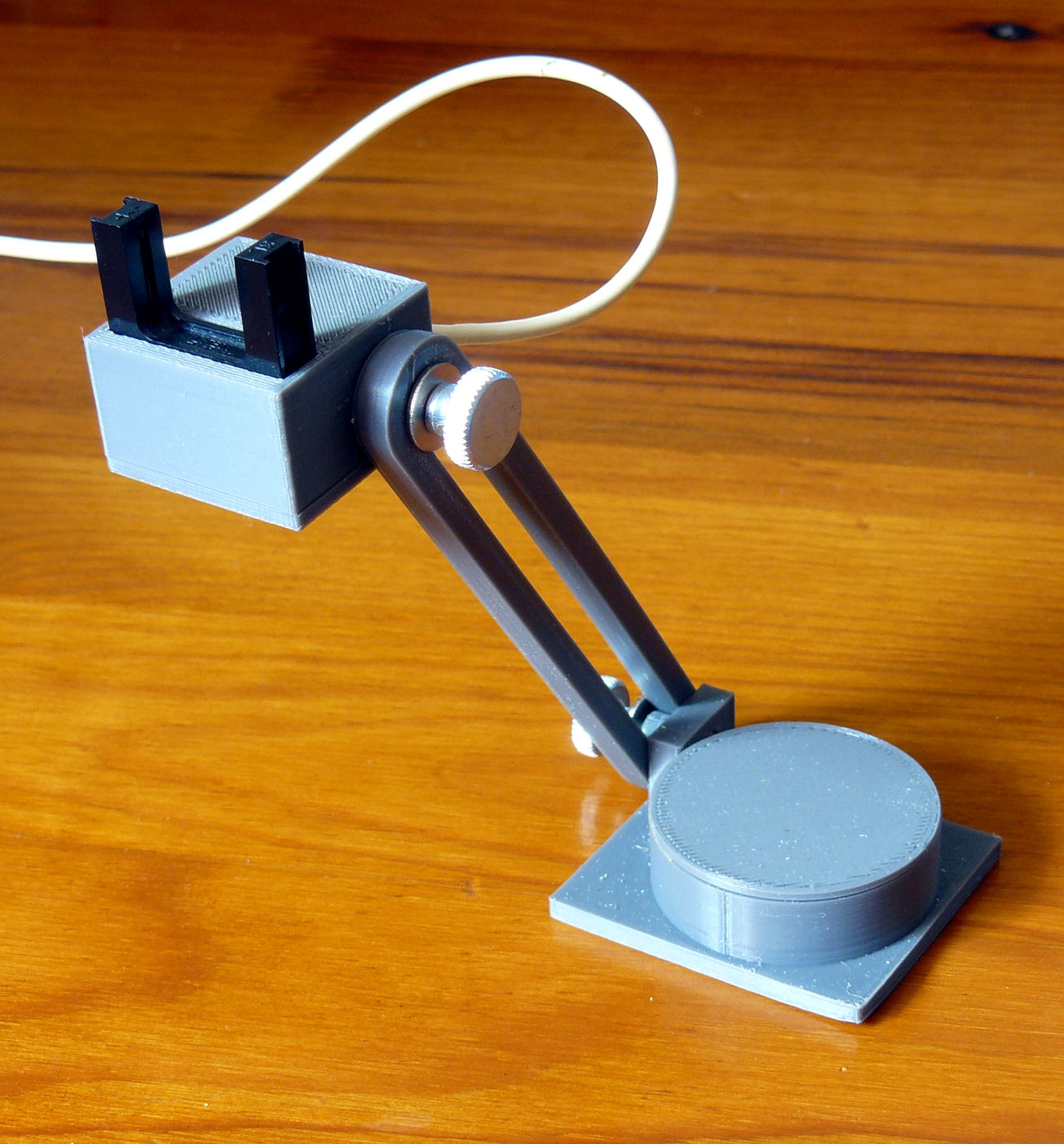
Ci-après, le capteur intégré dans un boitier et un support imprimé en 3D. Les fichiers sont disponibles sur Cults3D.
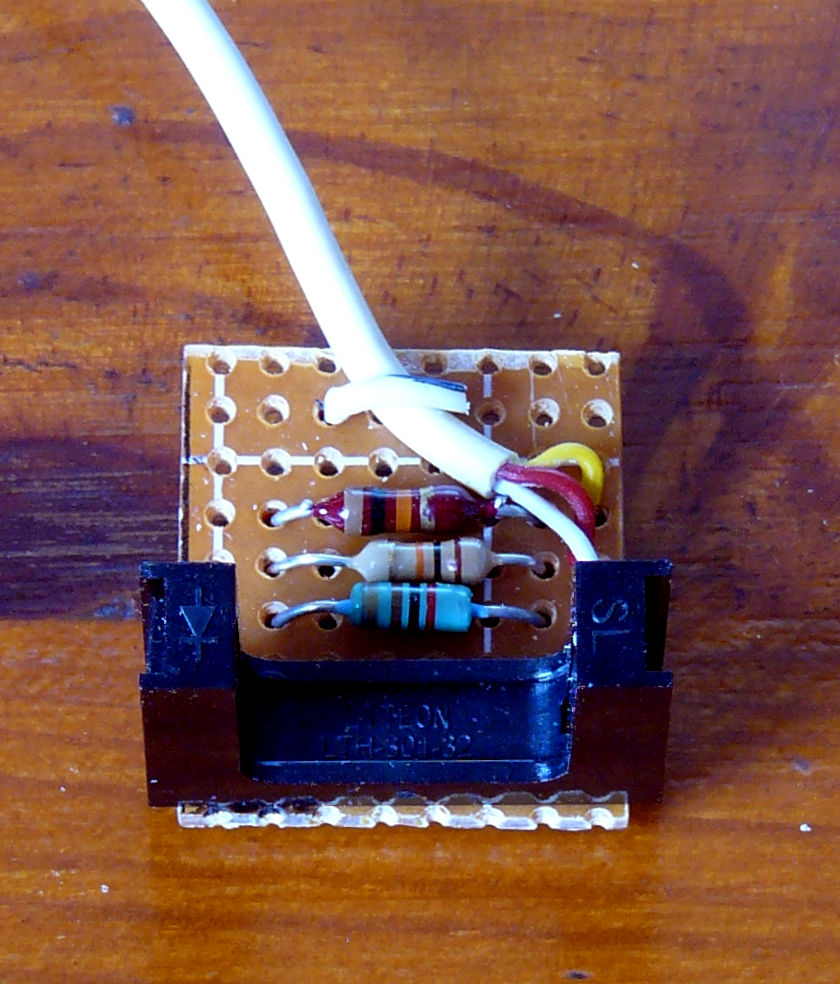
Ci-après, le capteur sur un circuit imprimé (prototype).
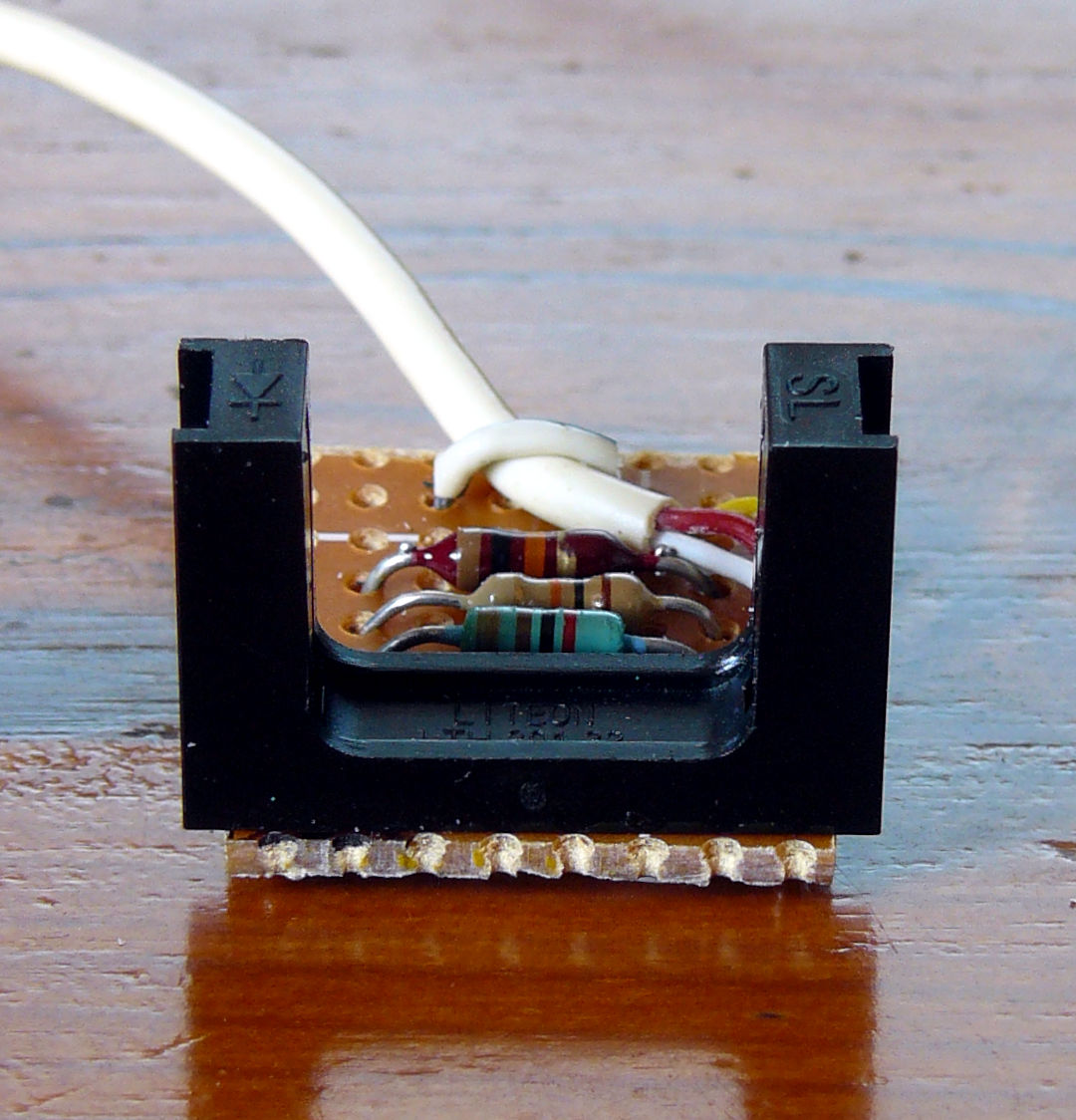
Prototype
Principales caractéristiques
Ce système fonctionne donc par coupure d'un faisceau. On peut en faire de différentes sortes selon les pendules ou horloges dont on dispose pour un coup très modique : quelques euros.
Le capteur utilisé a pour référence LTH-301-32 et coûtait moins de 5€ les 10 en 2023. Il a comme intérêt d'être assez large et assez haut (voir dimensions ci-après).
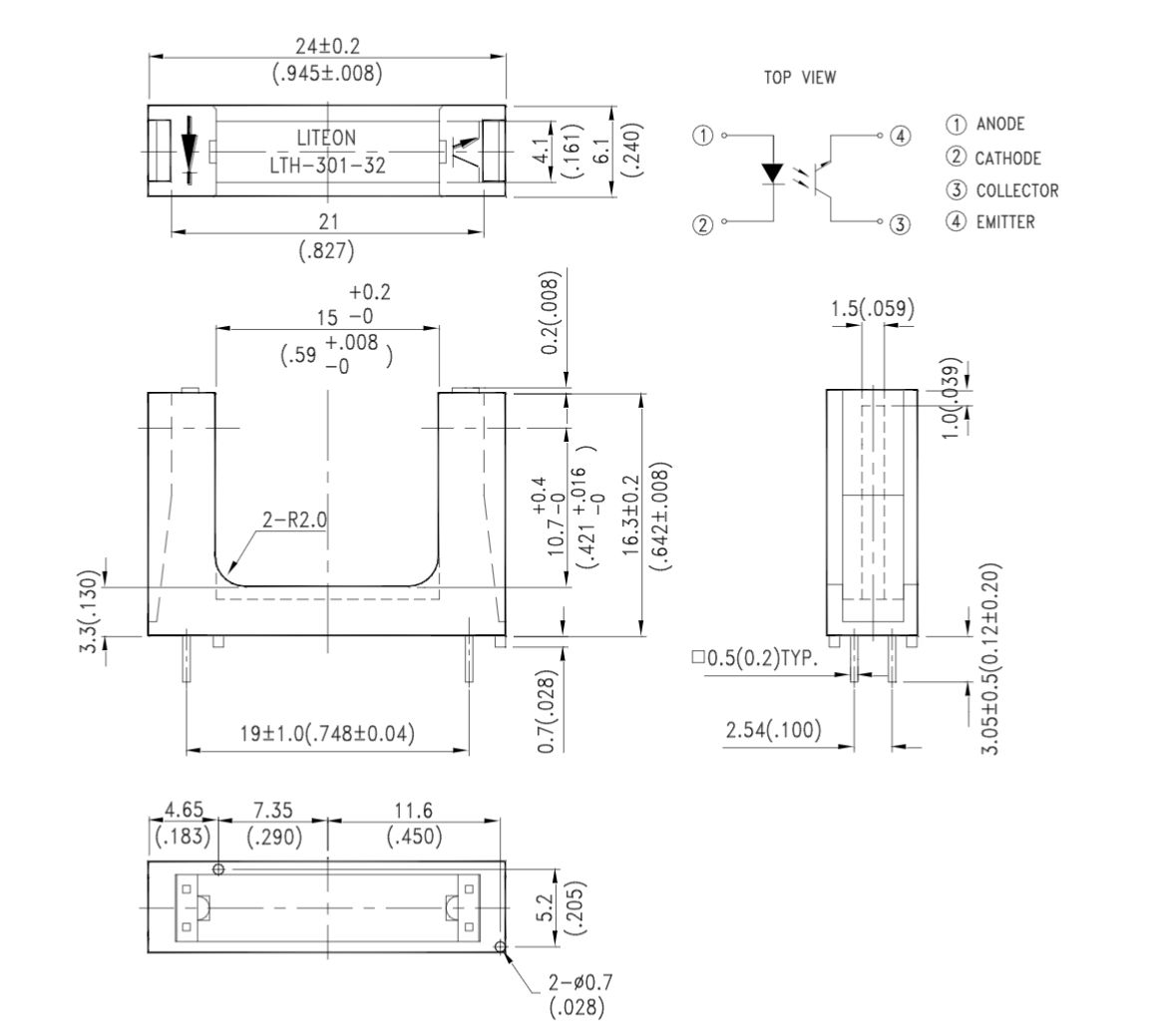
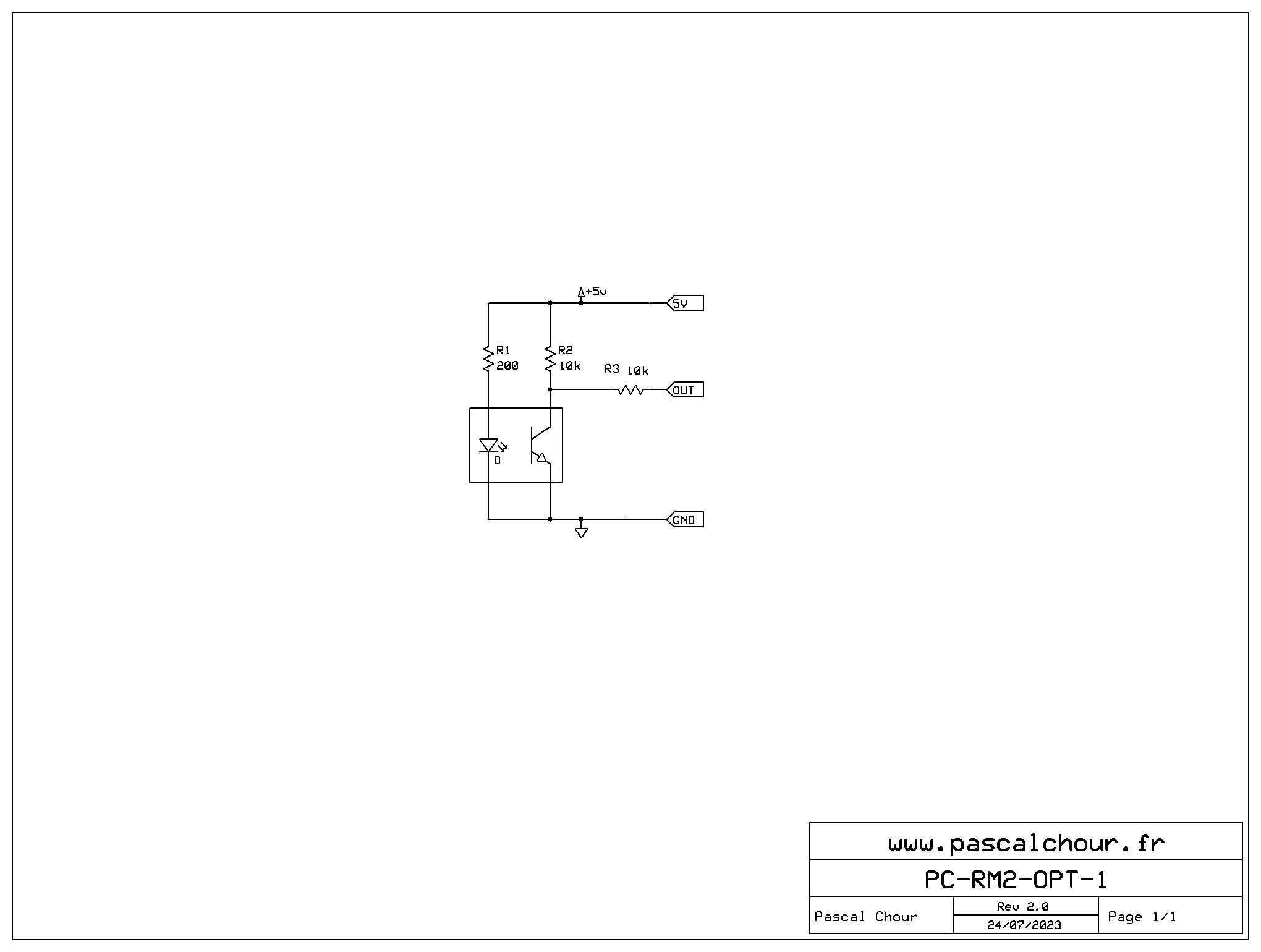
Le schéma est le suivant. Le capteur dispose d'une LED infrarouge et un phototransistor réagissant aux infrarouge. Ce capteur est mis dans un petit boitier avec une fente assez fine ou un petit trou pour ne pas être trop sensible à la lumière extérieure.
La LED est alimentée en 5V via une résistance de 200 ohms à 220 ohms. Le collecteur du photo transistor est alimenté en 5V via une résistance de 10kohms, le signal de sortie étant pris sur le collecteur via une résistance R3 (facultative) de 10 kohms.
Lorsque le photo transistor capteur est illuminé, il est passant et la sortie est aux alentour de 0V sur OUT. Lorsque le balancier coupe le faisceau, le photo transistor est bloqué et on récupère un signal de 5V sur la sortie OUT.
Dans une pendule, le balancier va faire un mouvement de va et vient. Le chronocomparateur va déterminer la durée de chaque va et vient et comme pour une montre, va indiquer la durée d'une période (un va et vient), la différence de temps entre les deux mouvements du balancier (droite vers gauche, gauche vers droite) et l'écart de temps sur 24 heures. Il faut pour cela connaitre la période normale du balancier qui dépend du mécanismes de la pendule (l'équivalent des battements pour une montre).
Principes de réalisation.
Les contraintes retenues pour ce capteur est d'être suffisamment petit pour éventuellement être mis à l'intérieur d'une pendule.
Avantages (+) et inconvénients (-)
- (+) Très faible coût.
- (+) Très grande facilité de réalisation.
- (+) Petit et pas très haut ce qui doit permettre de l'utiliser dans beaucoup d'horloges.
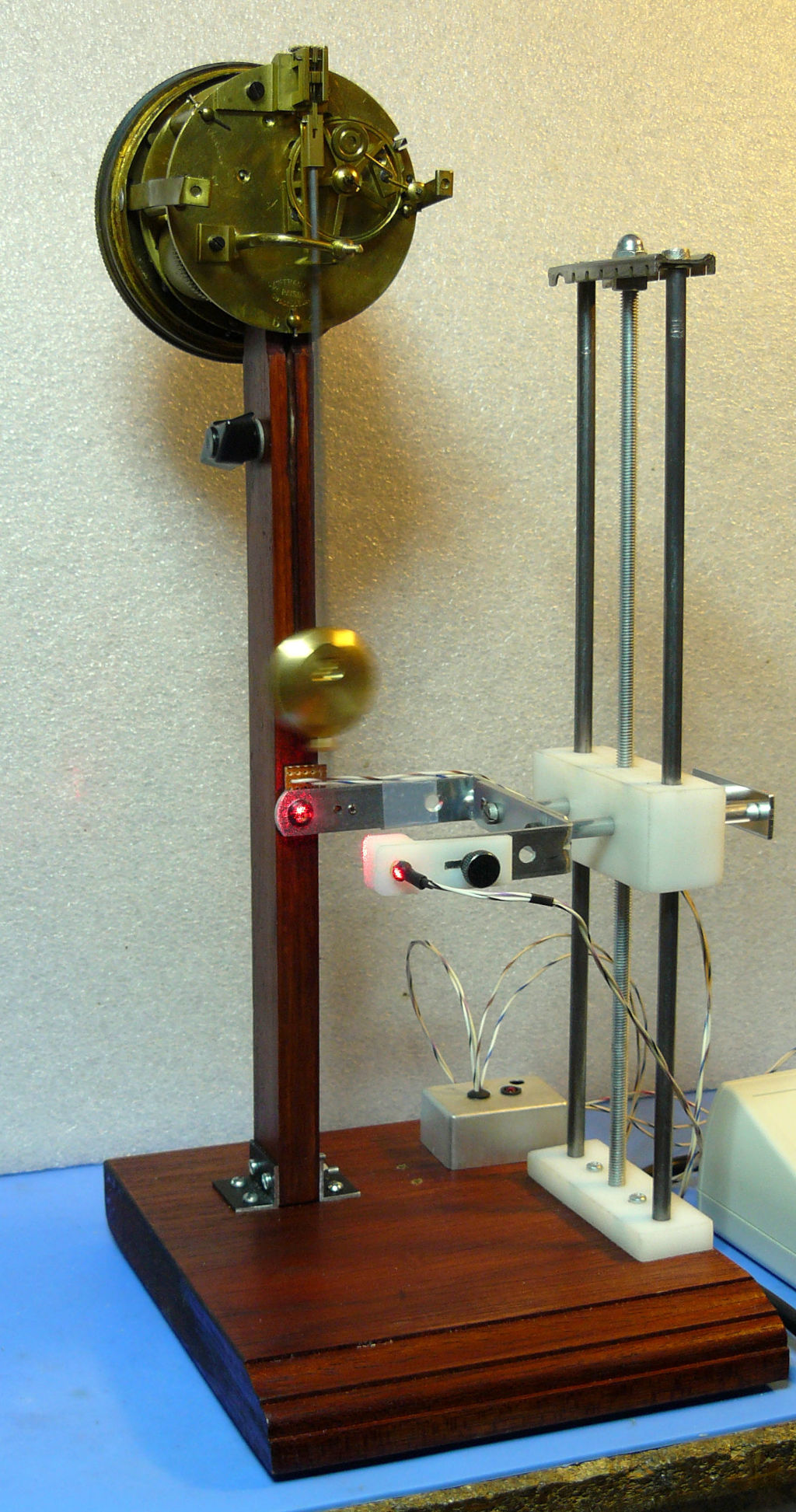
Capteur optique laser pour pendules de Paris
Ce capteur optique avec faisceau laser est destiné à régler les balanciers pour les horloges avec mouvements de Paris. Mais bien évidemment, la partie mécanique peut être modifiée pour s’adapter à d’autres types de pendules (Si vous voulez en savoir plus sur l'utilisation de ce capteur couplé avec PC-RM4 ou PC-RM5 pour le réglage de pendules de Paris, consultez cette page).
Et pour être clair, la version que j’ai réalisée est inutilement compliquée (on peut faire beaucoup plus simple) mais je l’ai conçu ainsi pour les raisons suivantes :
- Je voulais utiliser ce que j’avais en stock (du bazar accumulé au cours de dizaines d’années). Or, j’avais beaucoup de restes de tiges filetées et de tubes en acier ou en alu achetés pour d’autre projets. J’avais aussi un morceau de plastique POM-C (les parties en blanc sur la photo) et des cornières en métal. Pareil pour la partie électronique (c’est de la récupération ou du stock acheté pour des projets précédents). Finalement, la seule chose que j’ai acheté est le laser (1,50€ en 2023).
- Ca m’amusait de le faire comme ça (des trucs qui coulissent verticalement et horizontalement).
Finalement, la seule pièce réellement importante est le U qui vient entourer le balancier pour la mesure et qui comporte, à l’extrémité d’une des branches, un laser, et à l’extrémité de l’autre branche, le capteur optique.
Il faut qu’elle soit le plus rigide possible (les cornières en acier de 7cm que j’ai utilisé font parfaitement l’affaire) afin que le centrage du laser sur le capteur ne soit pas modifié en utilisation ni après une utilisation.
Le laser utilisé est un modèle de faible puissance 5mW (c’est déjà trop puissant) avec réglage de la focalisation et affichage d'un point. Je conseille de mettre une résistance ajustable en série avec l’alimentation pour régler la luminosité du laser : la distance entre le capteur et le laser est faible et il y a un risque d’éblouissement ou de réflexion désagréable avec le laser alimenté en 5V. Pour ma part, le montage fonctionne très bien avec une tension de l’ordre de 4V aux bornes du laser. Prendre une résistance en mesure de dissiper 0,25W ou plus (c’est le cas des ajustables que j’ai vu).
Pour le capteur, j’ai utilisé une photodiode BPW20 récupérée je ne sais où. J’ai eu la bonne surprise de constater qu’elle n’était pas perturbée par l’éclairage ambiant.
Je pense que n’importe qu’elle photodiode (voir phototransistor) peut convenir du moment qu’elle réagit à la longueur d’onde du laser (650nm). Évidemment, plus sa bande passante est centrée sur cette longueur d’onde et meilleur devrait être le résultat.
On règle la focalisation du laser pour qu’il forme un point, au niveau du capteur ou au niveau de la tige d’un balancier (ce n’est pas très critique car le capteur est proche du balancier).
Le petit montage électronique associé permet simplement de fournir un signal propre à un chronocomparateur. La LED s’allume à chaque fois que le laser est occulté par le balancier.
Avant de vous lancer dans une telle réalisation, demandez vous si finalement, PC-RM2-PZ-3 ne serait pas plus que suffisant (détection du choc de l’ancre. Coût : 1€ peut-être. Et fabrication très simple).
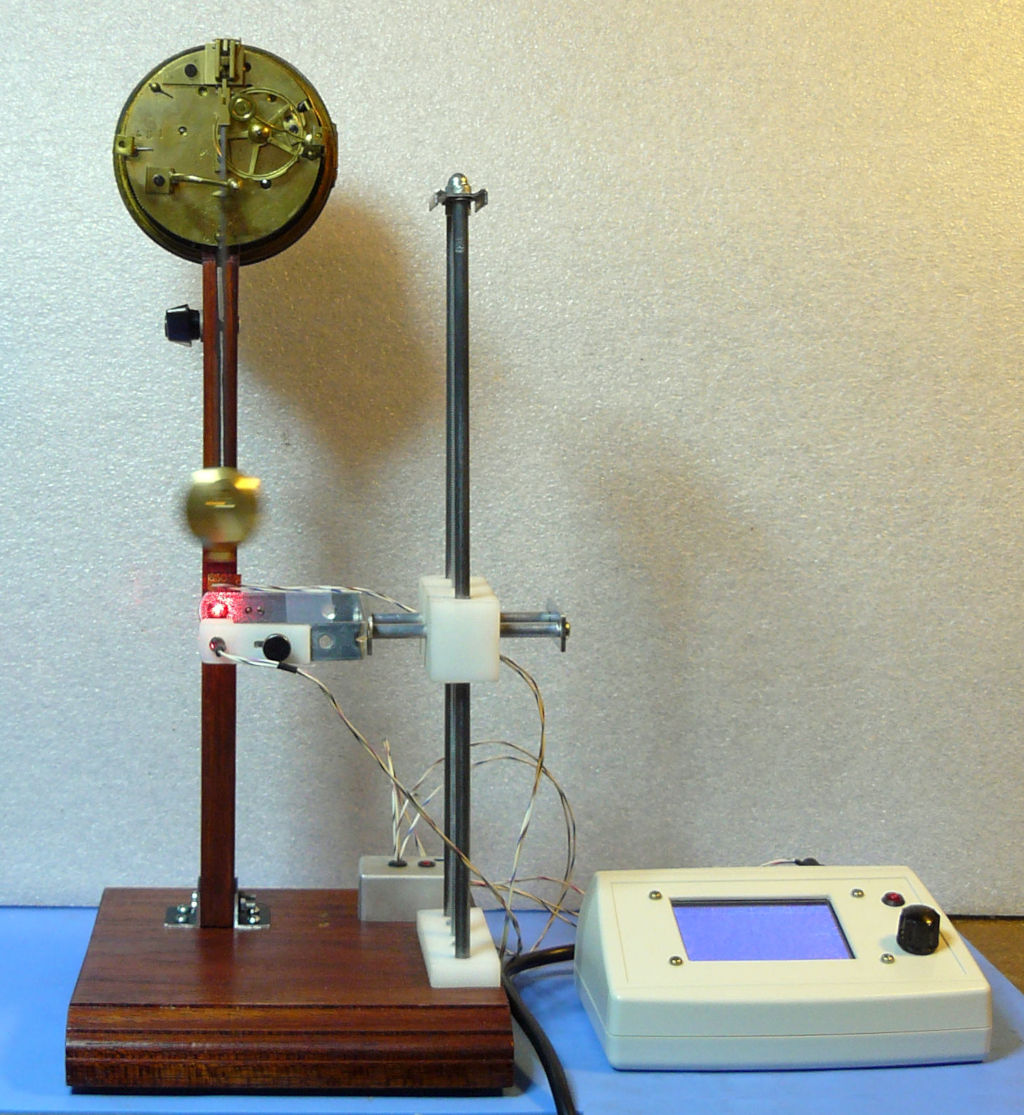
L’utilisation de ce banc de mesure se fait de la façon suivante (on suppose que le capteur est relié à PC-RM4 ou PC-RM5 pour la circonstance).
- On allume le banc (5V fourni par PC-RM4 ou PC-RM5).
- On positionne la pendule sur son support avec son balancier.
- On règle la position verticale et horizontale du laser pour qu’il coupe la tige du balancier au plus bas (idéalement, sous la lentille). À ce moment, la LED est allumée en permanence.
Lorsque le balancier oscille, il occulte périodiquement la LED qui s’allume et qui s’éteint dès que la photodiode est de nouveau illuminée par le laser. La LED clignote donc au rythme du passage du balancier à la verticale.
Pour le reste, le chronocomparateur effectue et affiche les mesures attendues : écart du battement par rapport à ce qui est attendu, équilibre du battement, avance/retard journalier.
Concernant le laser
Il existe plusieurs modèles de différentes formes, proposants différentes puissances, avec différentes lentilles permettant d’avoir un point, une croix ou une ligne.
Dans le cas présent, j’ai choisi une puissance de 5mW, un petit modèle (diamètre 6mm, corps laiton) et l’affichage d’un point.
Quelques retours sur la fixation du laser et de la photodiode
J’ai eu la mauvaise surprise de constater que le corps en laiton du laser était relié au plus de l’alimentation. Donc, si comme je l’ai fait au début, vous faites un support en métal, c’est tout le U qui sera au plus. Ce n’est pas forcément gênant… A condition d’isoler également le corps de la photodiode (pour une BPW20) qui est également au plus sinon, vous ne pourrez pas profiter du réglage de la puissance du laser puisqu’il sera alimenté par le corps de la photodiode.
Finalement, j’ai mis un bout de gaine thermo rétractable sur le corps de la photodiode et j’ai fait un petit support en POM-C pour le laser (il ne chauffe pas).
Il est important que les deux parties du laser (celle où se trouve la diode et celle où se trouve la lentille de focalisation que se visse ou se dévisse sur la première partie) soient maintenus dans le support.
Pour le réglage du laser, j’ai procédé ainsi :
- Le laser n’étant pas encore dans le support, on règle la focalisation jusqu’à former un point de l’autre côté du U. Vous remarquerez qu’il faut quasiment dévisser à fond la partie où se trouve la lentille. Du coup, les deux parties ne sont plus très bien ajustées (il y a un peu de jeu). D’où la nécessité que les deux parties soient maintenues dans le support.
- On enfonce ensuite le laser dans son support et on règle la position du support pour qu’un point se forme à peu près au centre de la photodiode.
Schémas
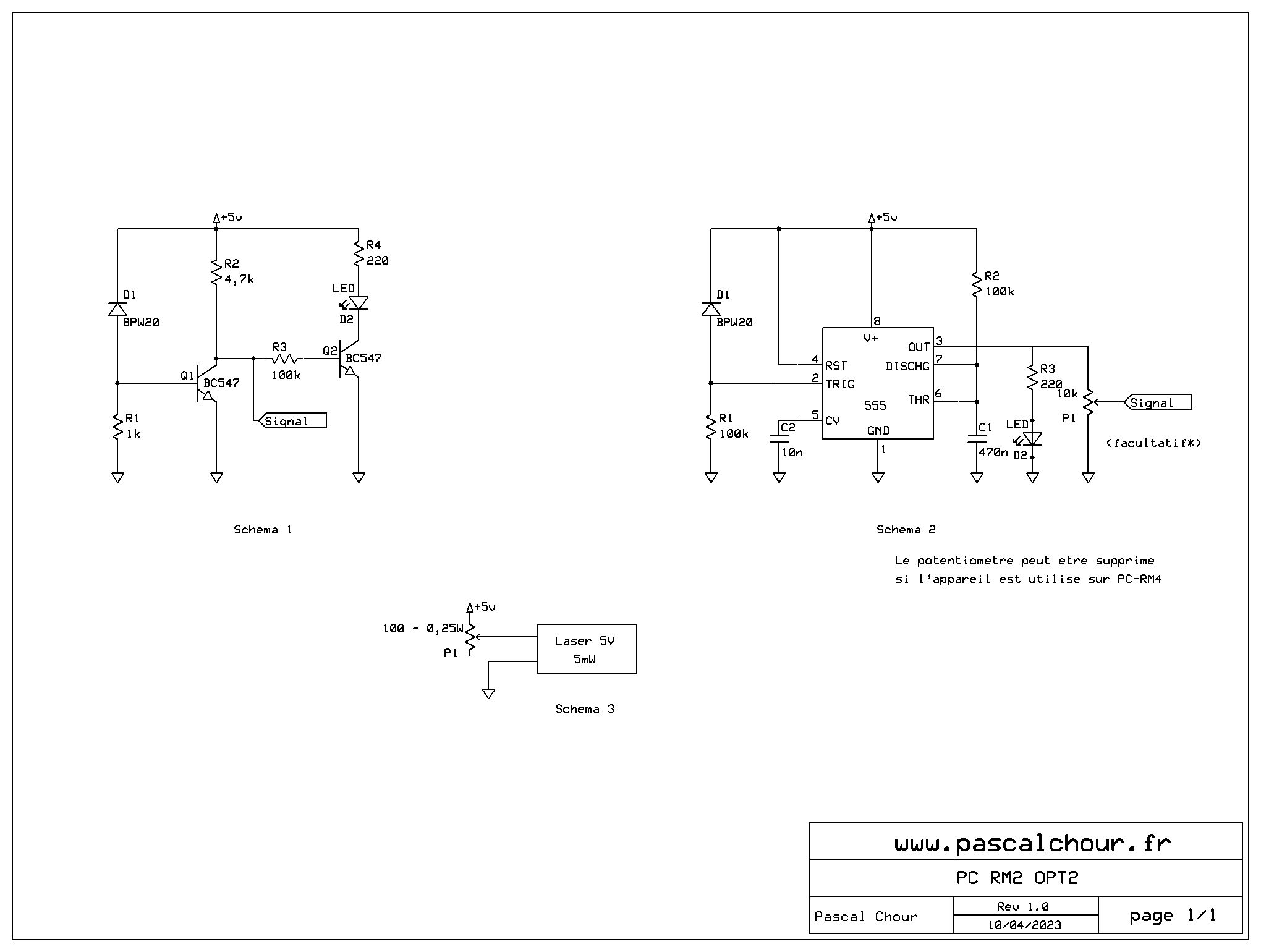
Je propose deux montages (testés). Le premier (schéma 1) est à base de transistors. La sortie se fait sur le premier transistor. Le second permet d’inverser le signal pour alimenter une LED qui s’allume lorsque le capteur n’est pas éclairé.
Un inconvénient cependant, la durée d’allumage de la LED peut être très court (le temps que le balancer passe devant le capteur).
On peut ajouter un potentiomètre pour régler le niveau de sortie du signal (pas vraiment utile s’il est branché sur PC-RM4 car il y a déjà un réglage de niveau sur l’entrée « haut-niveau » du chronocomparateur).
Le second (schéma 2) est celui que je conseille. Il utilise l’inoxydable 555 pour générer une impulsion de durée minimum fixe. Avec les valeurs données dans le schéma, cette durée est d’environ 50ms. (pour mémoire, la durée du signal se calcule de la façon suivante T = 1,1 x R2 x C1).
L’avantage est que la durée d’allumage de la LED est constante et 50ms est une valeur compatible avec la durée de l’oscillation d’une pendule (elle ne dépasse pas la durée de cette oscillation). Comme dans le schéma 1, la LED s’allume lorsque le capteur est occulté.
Le potentiomètre P1 permet de régler le niveau du signal. Même remarque que pour le schéma 1 : il n’est pas indispensable si le capteur doit être utilisé sur l’entrée « haut-niveau » de PC-RM4.
Réglage du dispositif de mesure
Idéalement, le capteur est à positionner au plus bas de la tige du balancier dont le diamètre minimum est supposé être de l’ordre de 2mm.
Lorsqu’il est immobile et bien positionné, la LED du capteur doit être allumée en permanence. Lorsque le balancier oscille, la LED s’allume à chaque fois qu’il passe devant le capteur.
Sur PC-RM4, on règle le nombre théorique de battements par heure. L’appareil peut ensuite afficher l’écart des battements par rapport à cette durée (ainsi que l’équilibre des oscillations).
Avantages (+) et inconvénients (-)
- (+) Peu coûteux (sauf si on doit tout acheter). Pour l’électronique, compter une dizaine d’euros si vous n’avez rien en stock chez vous.
- (+) Ca fait sérieux !
- (-) Le présent modèle est spécifique à un type de mouvement.
- (-) Complexe mécaniquement (mais comme indiqué, on peut faire beaucoup plus simple)
- (-) Finalement, le capteur piezo fait aussi bien et est beaucoup plus simple à réaliser. Un test avec les deux capteurs donne une différence de mesure d'une dizaine de secondes par jour sur une mesure d'une durée d'environ 10mn. On voit assez nettement les défauts de fabrication, la durée de l'écart d'un battement variant périodiquement de quelques ms.
Détail de la réalisation
Ci-après, quelques vues de la réalisation.
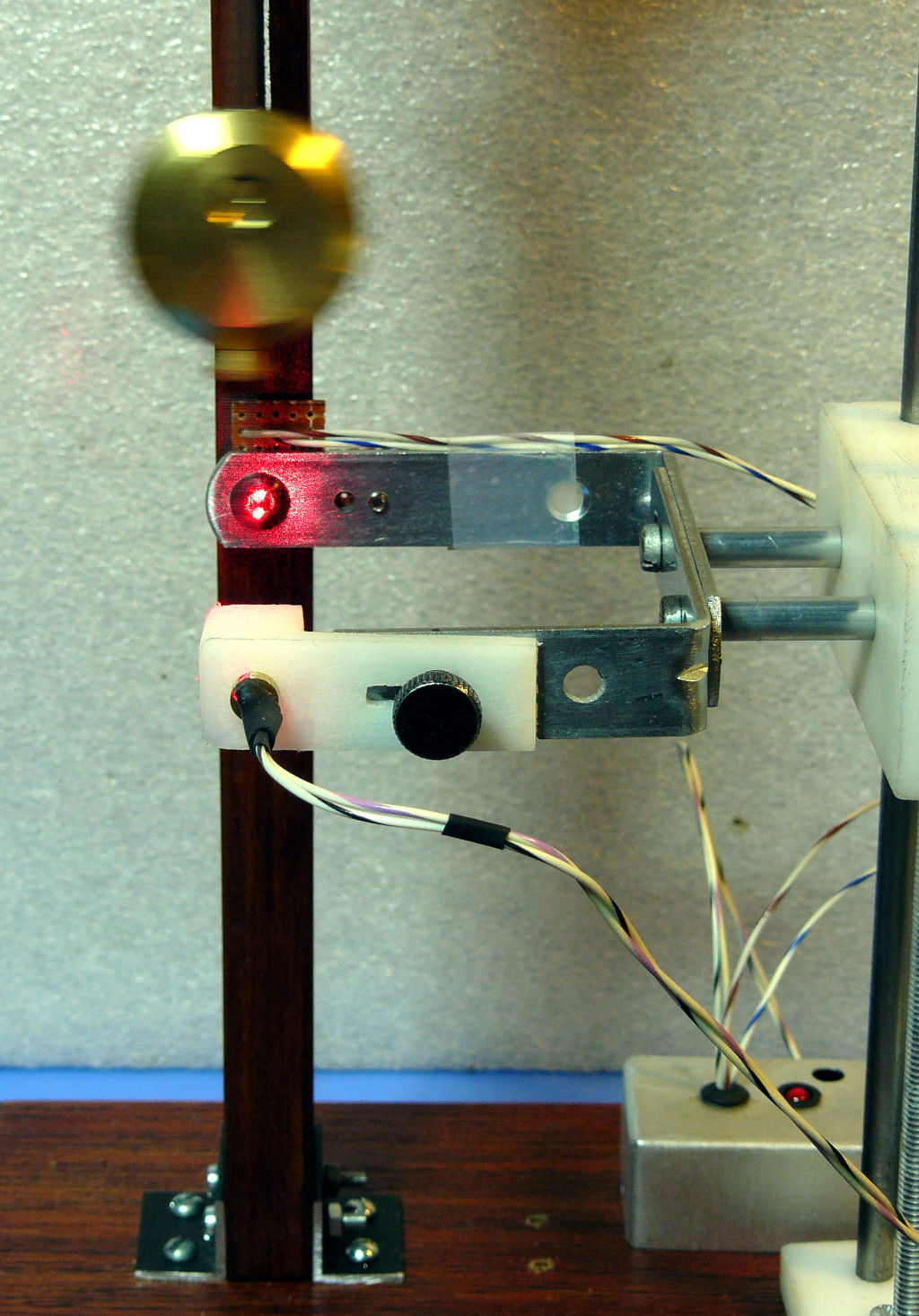
Détail sur le réglage du positionnement du laser avec sa vis de blocage.
Capteur optique laser pour pendules à balancier
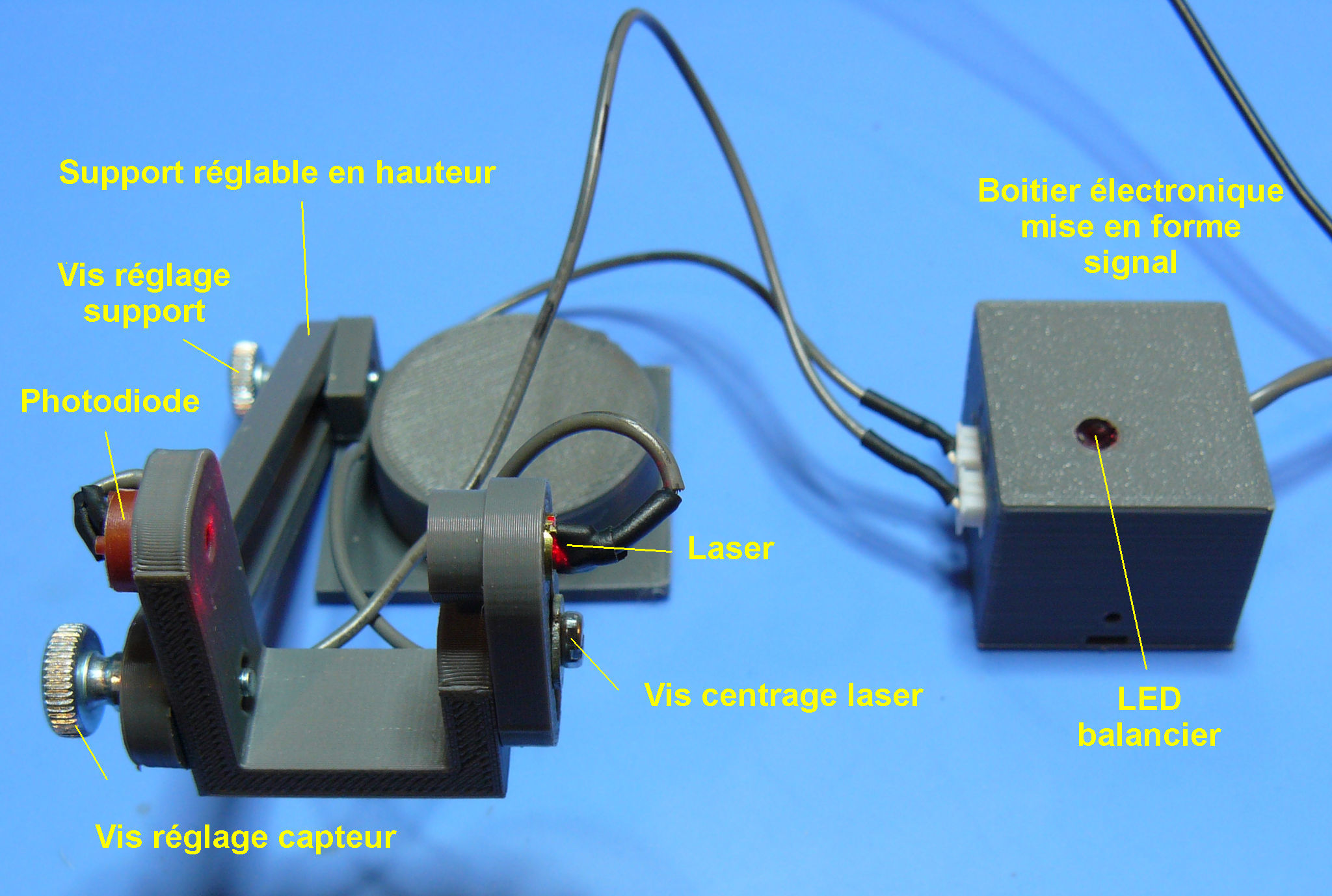
Ce capteur optique avec faisceau laser est destiné à régler les balanciers pour les horloges. La conception est la même que celle de PC-RM2-OPT-2 mais est plus simple à réaliser (si on dispose d'une imprimante 3D) et peut-être plus universelle. Il est déstiné à être utilisé avec le chronocomparateur PC-RM4 ou PC-RM5. Même si la page est plutôt dédiée aux pendules à mouvement de Paris, je vous suggère de regarder comment on peut l'utiliser sur cette page).
Principes de réalisation.
L'essentiel de l'appareil réalisé est en matière plastique (PLA) imprimée en 3D.
La pièce principale est un U dont une des branches comporte un laser et l'autre une photodiode. Un réglage permet de centrer une fois pour toute le laser sur la photodiode. Le balancier de l'horloge passe à l'intérieur du U et coupe périodiquement le faisceau laser. Cette information est transmise ensuite à un chronocomparateur via une petite électronique de mise en forme du signal.
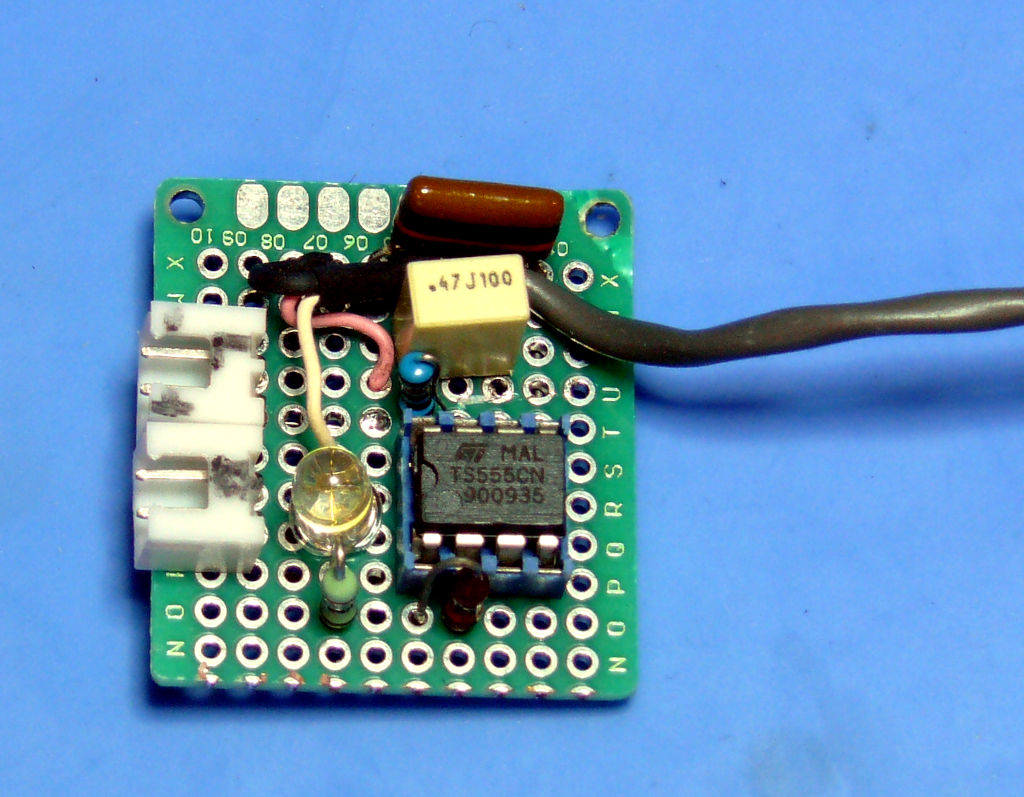
Le schéma de l'électronique est le même que pour PC-RM2-OPT-2. Je vous conseille la version avec le NE555, ici monté sur une plaquette d'essai.
Schémas électronique. Je vous conseille celui avec le NE555.
Montage

Boitier
Une prise permet de brancher le laser, l'autre la diode (marquées L (laser) et D (diode) sur le boitier. Une petite LED (5mm) signale lorsqu'elle est allumée que le balancier de l'horloge coupe le faisceau laser.
Le laser utilisé est un modèle de faible puissance 5mW (diamètre 6mm, longueur d'environ 10mm, corps laiton) avec réglage de la focalisation et affichage d'un point. Je conseille de mettre une résistance ajustable (1/4 de Watt)en série avec l’alimentation pour régler la luminosité du laser : la distance entre le capteur et le laser est faible et il y a un risque d’éblouissement ou de réflexion désagréable avec le laser alimenté en 5V.
Pour le capteur, j’ai utilisé une photodiode BPW20 récupérée je ne sais où. J’ai eu la bonne surprise de constater qu’elle n’était pas perturbée par l’éclairage ambiant.
Je pense que n’importe qu’elle photodiode (voir phototransistor) peut convenir du moment qu’elle réagit à la longueur d’onde du laser (650nm).
Le U avec son électronique est directement utilisable pour des mesure mais étant donné sa légèreté, il faut prévoir de le fixer (adhésif...).
Ce U peut aussi être fixé sur un support réglable en hauteur pour s'adapter à différents contextes. Le bras du support est fixé sur une platine plombée de façon à assurer sa stabilité (plomb de pêche de 80g).

Platine avec le plomb visible
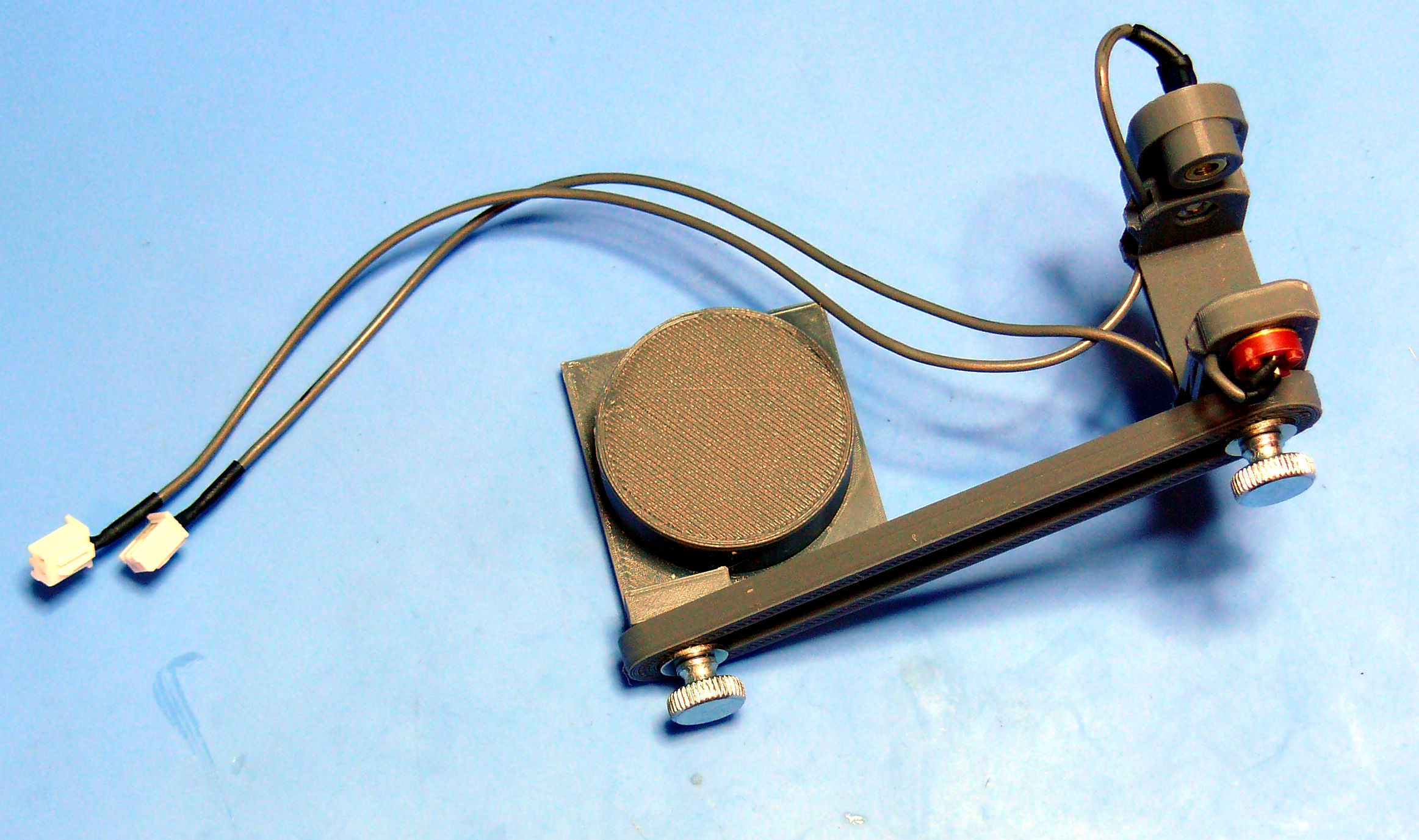
Platine avec le capot qui cache le plomb.
Deux vis moletées (longueur 12mm) permettent de bloquer l'inclinaison du support et du U.
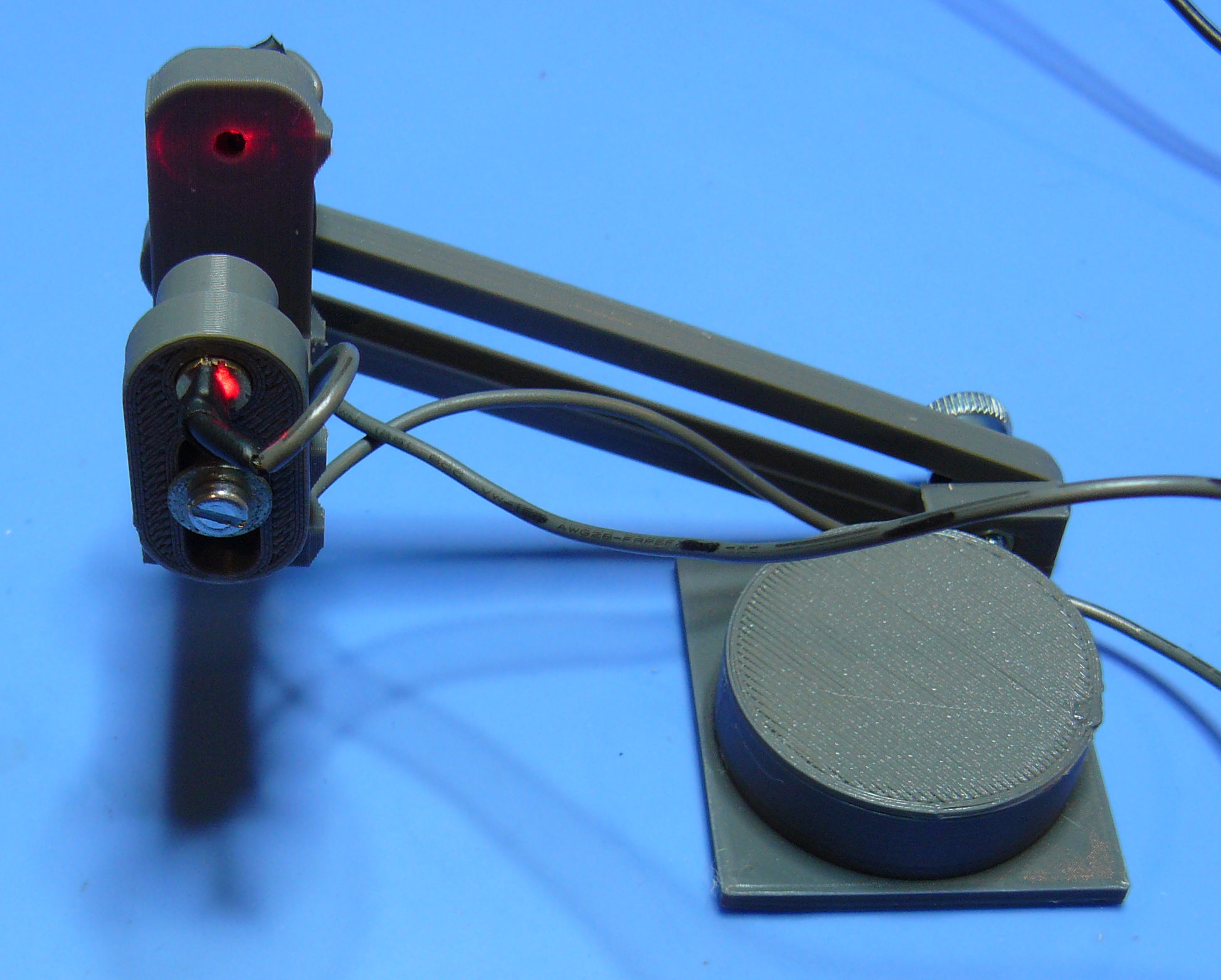
On voit ci-dessous l'ensemble avec le faisceau laser non coupé et coupé.
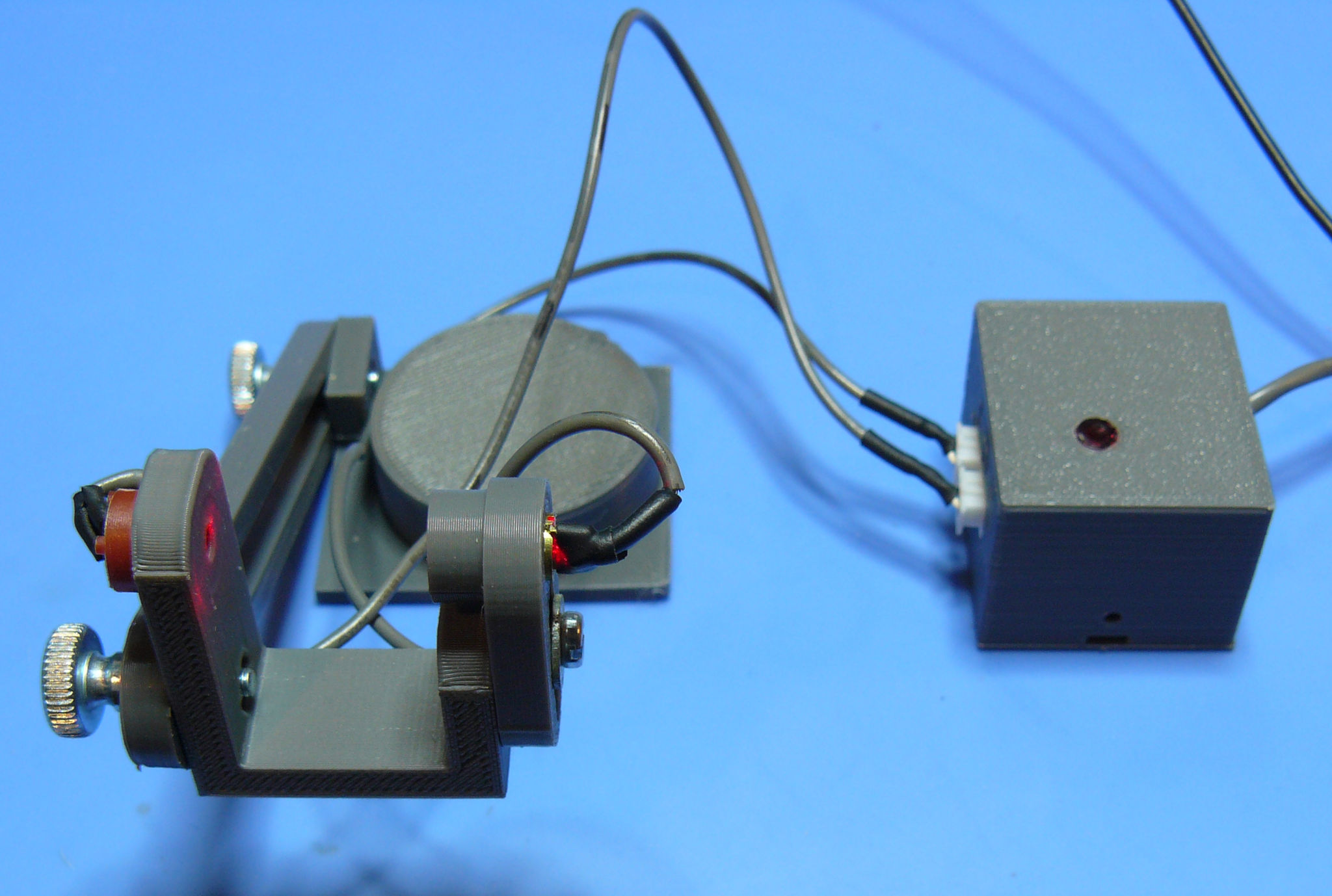
Laser non coupé.
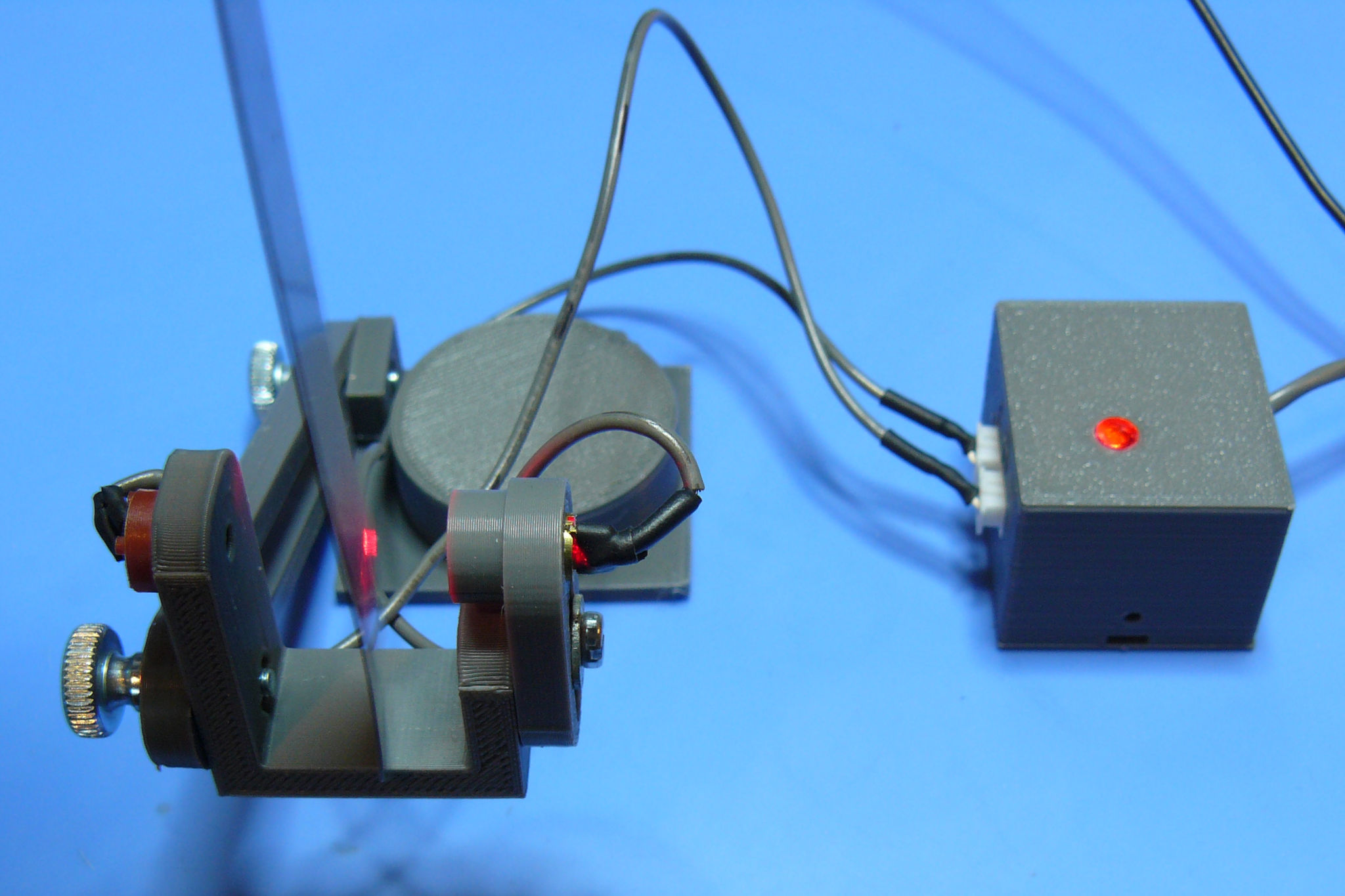
Laser coupé. La diode du boitier de l'électronique de mise en forme du signal s'allume.
Quelques autres vues de l'appareil.

L’utilisation de ce capteur se fait de la façon suivante (on suppose qu'il est relié à PC-RM4 ou PC-RM5 pour la circonstance).
- On allume le banc (5V fourni par PC-RM4 ou PC-RM5).
- On positionne le capteur au niveau bas du balancier.
- On s'assure qu'au repos, le laser est occulté par le balancier (LED allumée).
Lorsque le balancier oscille, il occulte périodiquement la LED qui s’allume et qui s’éteint dès que la photodiode est de nouveau illuminée par le laser. La LED clignote donc au rythme du passage du balancier à la verticale.
Pour le reste, le chronocomparateur effectue et affiche les mesures attendues : écart du battement par rapport à ce qui est attendu, équilibre du battement, avance/retard journalier.
Avantages (+) et inconvénients (-)
- (+) Peu coûteux. Pour l’électronique, compter une dizaine d’euros si vous n’avez rien en stock chez vous.
- (+) Efficace.
- (+) Assez universel.
- (-) il faut disposer d'une imprimante 3D pour faire les pièces.