



CHOUR - Régleur de montres mécaniques / chronocomparateur RM1
Appareil : Chronocomparateur (régleur de montres mécaniques)
Date : décembre 2018-janvier 2019. Révision schéma matériel, juin 2022.
Type : PC-RM1
Marque : Chour
Dernière version logicielle : V1.4
Principaux constituants : Arduino pro micro, capteurs, afficheur
English version : 
Informations connexes
Principe des montre mécaniques
Chronocomparateur PC-RM4
Capteur pour chronocomparateur
Présentation
L’appareil présenté sur cette page est un régleur de montres mécaniques d’atelier de faible coût. On l’appelle également Chronocomparateur. Il permet de vérifier la dérive d’une montre (plus ou moins un certain nombre de secondes par jour) et de la régler afin de minimiser cette dérive.
Je ne détaillerai pas le fonctionnement d’une montre mécanique. On trouve de nombreuses explications très bien faites sur le net. Disons simplement que le réglage peut se faire à l’aide d’un ou deux dispositifs (ça dépend des montres) appelés « raquettes » qui agissent sur le ressort spiral du balancier spiral et permettent :
- d’augmenter ou diminuer la fréquence du battement du balancier
- De faire en sorte que la durée d’un « tic » soit égale à la durée d’un « tac » (régularité du mouvement. Ce dernier réglage n’est pas toujours présent).
Comment fonctionne un régleur de montre ?
Pour faciliter les explications, on considèrera qu’une montre fait « tic-tac » (le petit bruit que vous entendez qui est produit par l’échappement de la montre). Cette notion de « tic » et de « tac » est arbitraire, un « tic » pouvant être un « tac » et inversement. Mais une fois que vous avez décidé qu’un bruit est un « tic », le suivant est un « tac ».
Un régleur de montre détecte les « tic » et les « tac » de la montre, mesure la période entre deux « tic » (ou « tac ») et compare cette période à celle attendue en fonction de la conception de la montre.
Un dispositif d’affichage permet d'afficher la différence entre la valeur mesurée et la valeur attendue. Si la valeur mesurée est plus faible que la valeur attendue, la montre va avancer, si elle est plus longue, elle va retarder. Le but du jeu est de faire en sorte que cette différence tende vers zéro en agissant sur la raquette qui commande l’avance (marqué A ou F) et le retard (marqué R ou S).
Il permet également de mesurer la régularité du mouvement, en d’autres termes, la différence de durée entre un « tic » et un « tac ». Là aussi, le but du jeu est de faire en sorte que cette différence tende vers 0 en agissant sur la raquette du porte piton (lorsqu’elle est présente, sinon, c’est plus compliqué) qui permet le réglage de l’alignement du balancier avec l’ancre et la roue d’échappement.

Raquettes. L'image provient de montres pour tous
Vous trouverez d'autres informations à ce sujet sur cette page.
Notion de battements, période et fréquence
Les valeurs de durée ou de fréquence attendues dépendent du calibre de la montre. Le tableau ci-après donne quelques valeurs courantes :
- Du nombre de battements Bh par heure (nombre de « tic » ou de « tac ») par heure.
- De la fréquence du battement Fs = Bh / 3600
- De la période du battement en millisecondes (ms) avec P = 1/Fs (durée entre deux « tic » ou entre 2 « tac »)
- De la durée D d’un « tic » ou d’un « tac » = P/2
| Bh | Fs | P | D |
| 18000 | 2,5Hz | 400ms | 200ms |
| 21600 | 3,0Hz | 333ms | 166ms |
| 28800 | 4,0Hz | 250ms | 125ms |
| 36000 | 5,0Hz | 200ms | 100ms |
Quelques caractéristiques du régleur de montre
Ce régleur de montre vise :
- Un coût de réalisation très faible (environ 30€), pour peu que vous soyez un minimum bricoleur.
- Une taille réduite afin de pouvoir être facilement posé sur une paillasse toujours trop encombrée…
- Une très grande facilité d’emploi.
- Une bonne précision de mesure (on y reviendra).
Si vous êtes quelqu’un d’ordonné et que vous avez de la place, alors, vous pouvez utiliser un micro-ordinateur portable et dans ce cas, je vous conseille le schéma proposé par http://www.watchoscope.com/amplifier.html mais avec quelques modifications (voir plus loin). À noter que l’appareil que je propose ici peut aussi être connecté à un micro-ordinateur. Vous avez donc deux appareils pour le prix d’un.
Les principales fonctionnalités sont les suivantes :
- Alimentation via USB en 5V.
- Sélection du nombre de battements par heure.
- Déclenchement, arrêt de la mesure.
- Mesure et affichage de la différence entre la période mesurée de la montre et la période attendue.
- Mesure et affichage de la différence entre la durée d’un « tic » et la durée d’un « tac ».
- Mesure et Affichage du nombre de secondes d’avance ou de retard par jour.
- Choix entre capteur piezo externe et capteur microphonique intégré (optionnel).
- Sortie du signal analogique permettant de connecter l’appareil à l’entrée microphone d’un ordinateur.
- Potentiellement, communication USB entre un ordinateur et l’appareil (en cours de développement)
- Résolution théorique de 4µs et précision théorique de 1% (voir le chapitre consacré à ce sujet pour en savoir plus).
Fonctionnement général d’un régleur de montre
Un régleur de montre comporte :
- Un capteur électronique : il sert à détecter les « tic » et les « tac ». On utilise généralement un capteur piezo électrique mais on peut également utiliser un microphone, ou, pourquoi pas, un capteur optique.
- Un amplificateur : si l’on utilise un capteur piezo électrique ou un microphone, le signal généré sera très faible. Il faudra l’amplifier tout en cherchant à rejeter les bruits parasites.
- De nos jours, un microcontrôleur qui fera les mesures et gèrera des affichages.
Le capteur
Le capteur généralement utilisé est de type piezo électrique (piezo par la suite) qui utilise les propriétés de certains corps de générer une tension électrique lorsqu’ils subissent une contrainte mécanique comme, par exemple, un choc.
On trouve de tels capteurs pour environ 1,5€ les 10. Pour ma part, j’ai pris un modèle de diamètre 20mm.
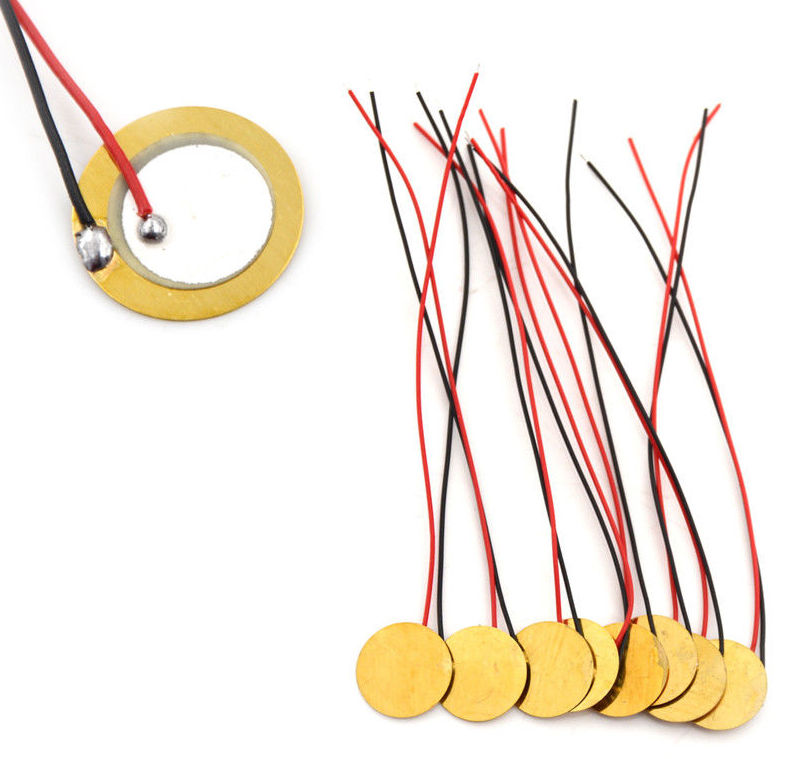
Capteur piezo
Vous pouvez aussi récupérer un tel capteur sur une vieille montre à quartz avec alarme puisque l’organe qui produit le son de l’alarme est également un capteur piezo.
Pourquoi utilise-t-on préférentiellement ce type de capteur ? Il est peu coûteux, très sensible aux chocs et très peu sensible aux bruits ambiants.
On peut également utiliser un microphone électret. Pour ma part, j’ai testé ce modèle qui fonctionne de manière satisfaisante. Il dispose de son propre préamplificateur, l’ensemble étant vendu aux alentours de 1,5€.
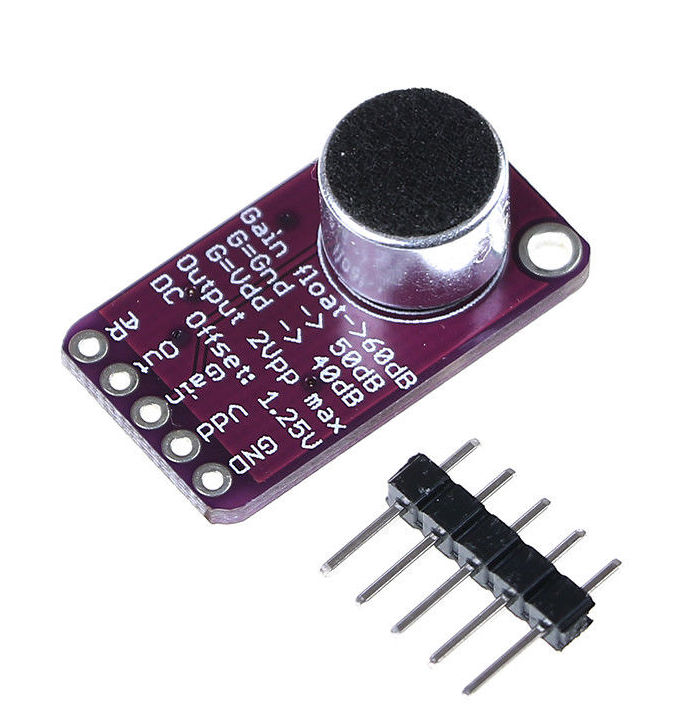
Capteur microphonique
Si vous utilisez cette solution, vous n’aurez pas à construire d’amplificateur puisqu’il est intégré. Par contre, il est moins performant que le capteur piezo et surtout, il est très sensible aux bruits ambiants (c’est normal, il est fait pour ça). Une porte qui se ferme, une voiture qui passe, etc. et toutes les mesures sont perturbées.
L’amplificateur
Si vous utilisez le capteur piezo, vous devrez construire un amplificateur pour amener la valeur du signal à un niveau utilisable par le microcontrôleur (voir plus loin).
Il est inspiré de celui que l'on trouve sur le site http://www.watchoscope.com/amplifier.html qui est très performant et peu coûteux.
Toutefois, il a l’inconvénient de nécessiter une tension de 9V alors que le régleur de montre est alimenté via la prise USB de son microcontrôleur et ne dispose donc que de 5V.
J'ai remplacé le TL074 utilisé par un LM324. Il est PIN à PIN compatible. Le montage fonctionne aussi bien qu'avec le TL074 (j'ai fait les deux) mais peut être alimenté en 5V.
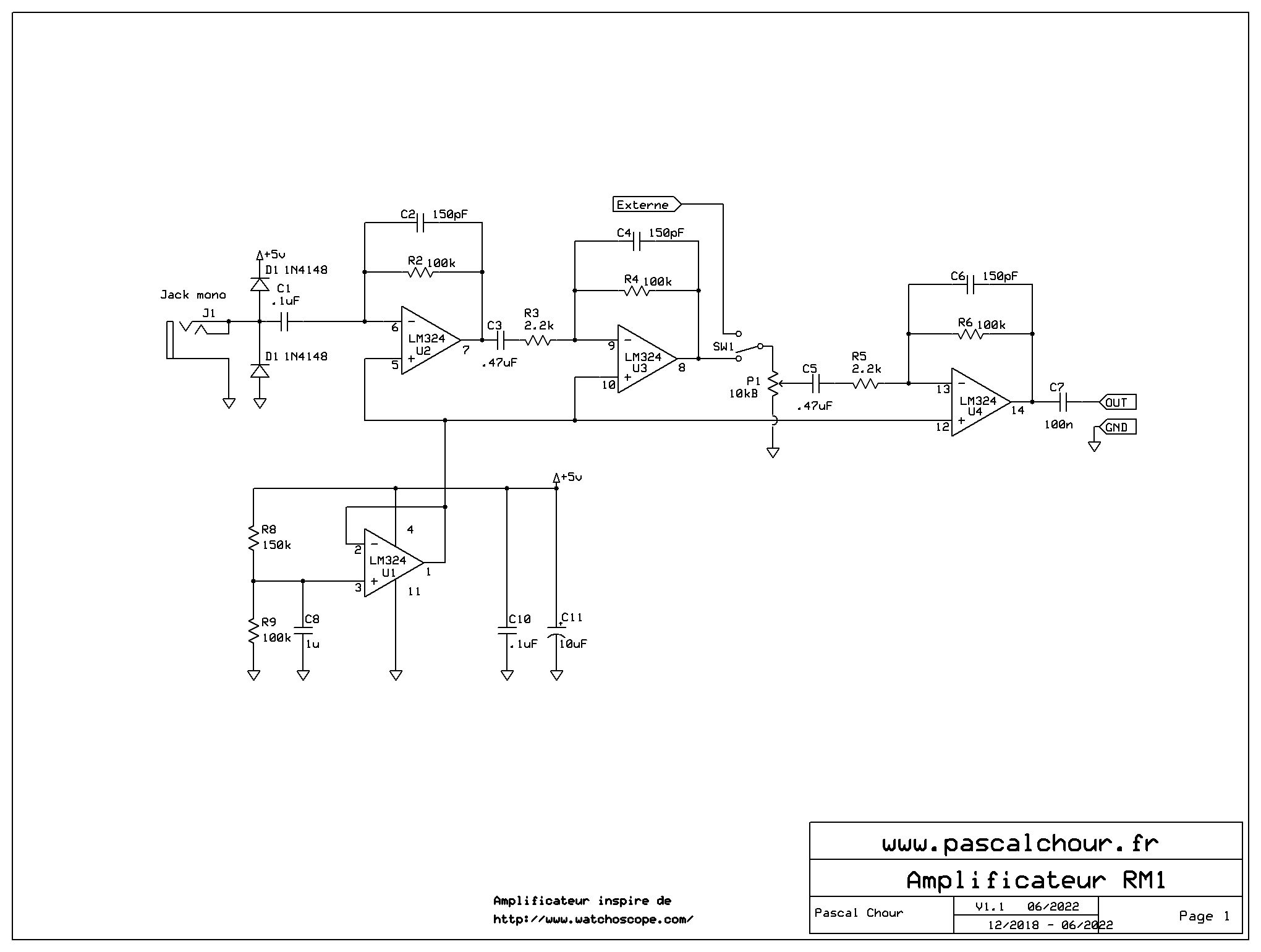
Schéma amplificateur
J’ai également ajouté un circuit de mise en forme du signal pour qu’il soit plus facilement exploitable par le microcontrôleur. Pour ce faire, j’ai utilisé l’inoxydable monostable 555 (conçu en 1970 ! Sans doute le circuit analogique le plus célèbre et le plus connu du monde de l’électronique) que l’on trouve partout pour une poignée de queues de cerises.
Ce monostable permet de générer un signal rectangulaire à partir du signal analogique généré par le capteur.
Pour déclencher le 555, il est nécessaire d’inverser le signal d’entrée. Un transistor (ici, un BC109 car j’en avais plein mais vous pouvez aussi utiliser un BC548 ou n’importe quel transistor bipolaire général NPN pour petits signaux) est utilisé à cet effet.
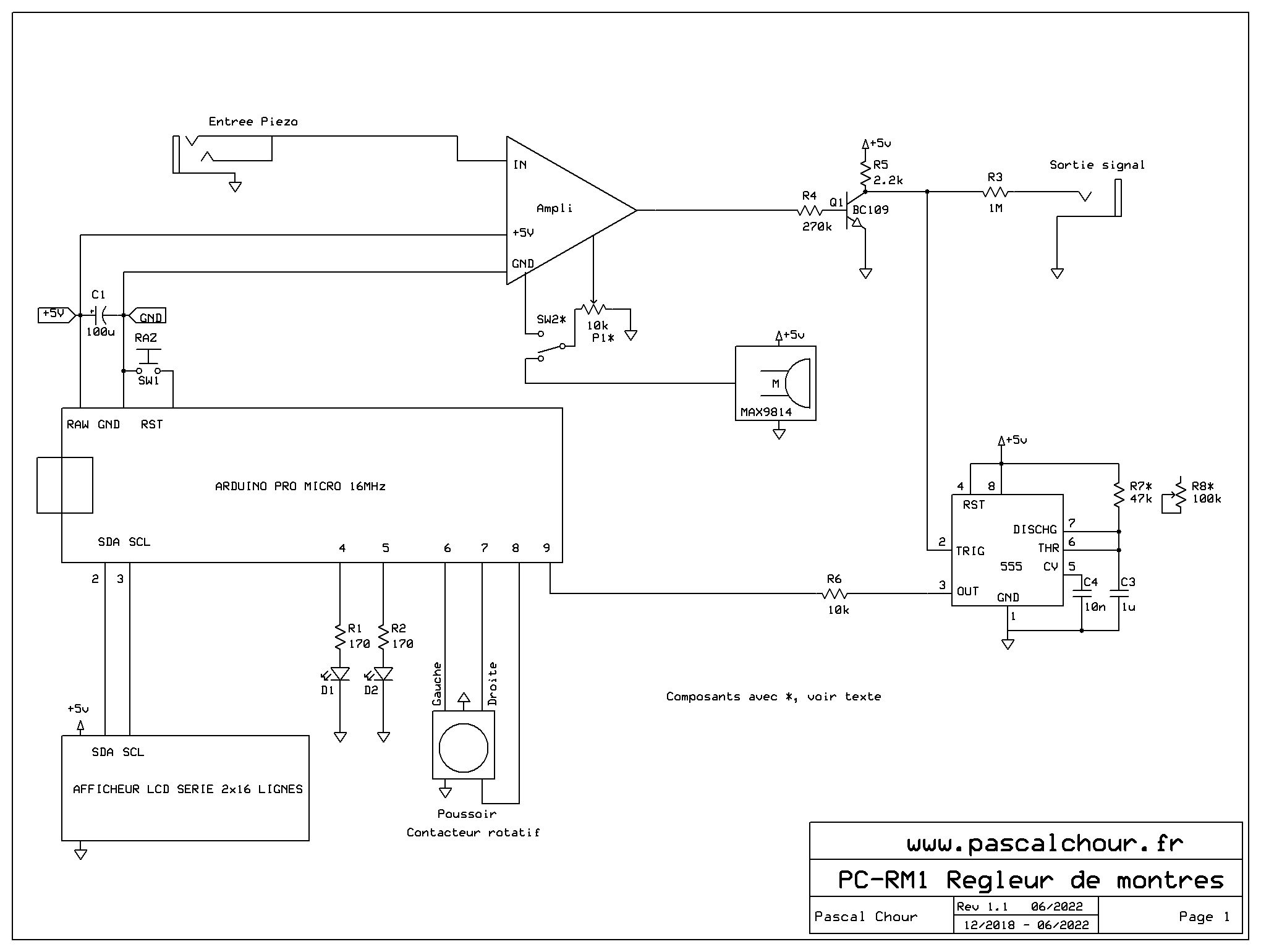
Schéma complet
Microcontrôleur
Le microcontrôleur est un Arduino Pro Micro ATmega32U4 5V 16MHz que l’on trouve pour environ 3,5€. Son programme est en téléchargement sur cette page.
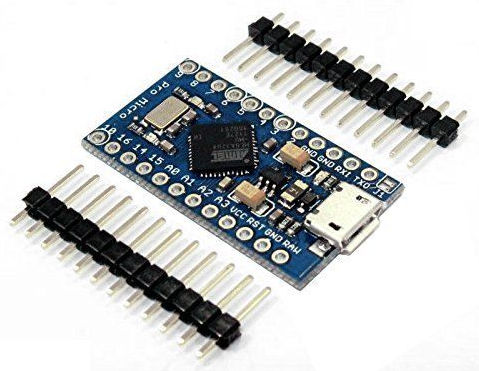
Microcontrôleur pro-micro
L’afficheur
L’afficheur LCD est de type IIC-I2C-TWI-SP-I-Serial-Interface1602, 2 lignes de 16 caractères qui coûte environ 2,5€.
Afficheur 2 lignes de 16 caractères
Les autres composants
On trouve des résistances, condensateurs, potentiomètres, LED, prise jack, contacteur, etc. et une plaquette d’essai pour souder les composants. Si vous êtes électronicien, vous avez probablement tout ça en stock. Sinon, il vous faudra les commander. Vous ne devriez pas vous en tirer pour plus de 10 à 15€.
Un mot quand même sur le contacteur : il s’agit d’un modèle rotatif avec poussoir momentané que l’on trouve pour environ 2€ les 5.
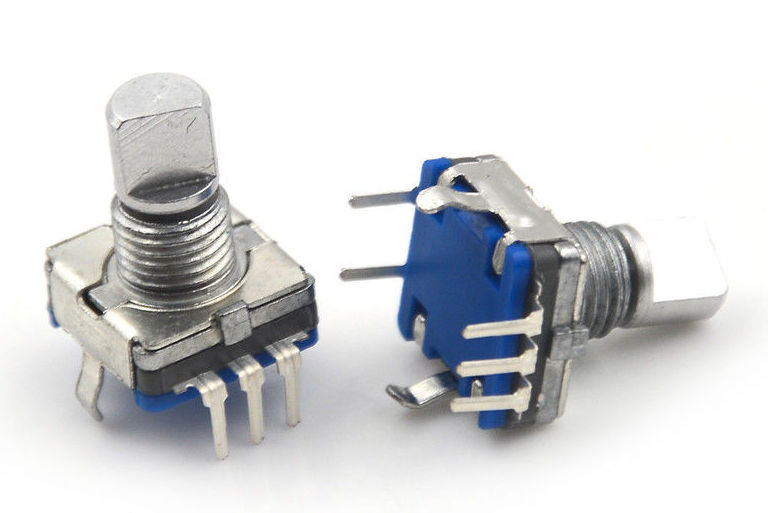
Contacteur
Ensuite, il vous faudra mettre tout ça dans un boitier et bricoler un étau à montres pour y mettre le capteur. Consultez la page PC-RM2 si vous voulez avoir des idées à ce sujet.
Pour le boitier du chronocomparateur, j'en ai pris un en plastique que j’avais en stock pour un montage que je n’avais jamais fait.
Commentaires sur le schéma
P1 est un modèle log (piste B).
MAX9814 et SW1 sont optionnels. Je souhaitais disposer sur l'appareil d'un capteur microphonique intégré avec son propre amplificateur (le MAX9814). Les résultats sont corrects pour peu que la montre soit assez bruyante.
Dans ce contexte, SW1 sert à choisir, soit la sortie de l'amplificateur piezo, soit la sortie de l'amplificateur microphone du MAX9814.
Si vous ne retenez pas l'option d'un microphone intégré, supprimez le MAX9814 et remplacez SW1 par un strap.
Le potentiomètre multi tours R8 sert à régler la durée de l’impulsion générée par le 555 en fonction du condensateur associé.
La durée de l’impulsion T = R8 x C3 x 1,1 où R8 est exprimé en ohms et C3 en Farads
Ainsi, pour une durée de 50 millisecondes avec C3=1µF, R8 vaut environ 45kohms.
Durant cette durée « d’occultation », aucun signal n’est pris en compte par le montage.
50ms est la durée que j’ai retenue. Elle permet d’éviter de comptabiliser d’éventuels chocs parasites comme étant des « tic » ou des « tac ». Elle est compatible avec les périodes jusqu’à 36000 battements par heures. Par contre, si vous avez une montre dont le nombre de battement par heures est supérieur ou égal à 72000, alors, vous ne mesurerez plus rien.
Le choix de cette durée d’impulsion vous appartient. Si vous souhaitez une durée fixe de 50ms, vous pouvez remplacer le potentiomètre multi tours par une résistance R7 d’environ 47kohms.
Vous pouvez aussi décider que cette durée est trop importante. Vous diminuerez alors la résistance, avec le risque que certains chocs parasites qui suivent l’impulsion que l’on souhaite mesurer viennent perturber la mesure.
Pour ma part, j’ai mis un potentiomètre pour le cas où je tomberai un jour sur une montre spéciale nécessitant une modification de cette durée. Mais je n’ai pas jugé utile de mettre ce potentiomètre en façade. C’est néanmoins une option que vous pouvez envisager. Cela fera un réglage de plus…
Vous pouvez également décider que cette durée « d’occultation » de la mesure devrait dépendre du nombre de battements par heure de la montre. Dans ce cas, vous pourrez modifier le programme de l’appareil pour que cette adaptation soit automatique et vous réglerez la durée du signal sur le 555 aux alentours de 5mS. A ce titre, vous pourrez vous inspirer du logiciel de PC-RM3 qui réalise cette fonction par programme (il n'y a pas de circuit de mise en forme à base de 555).
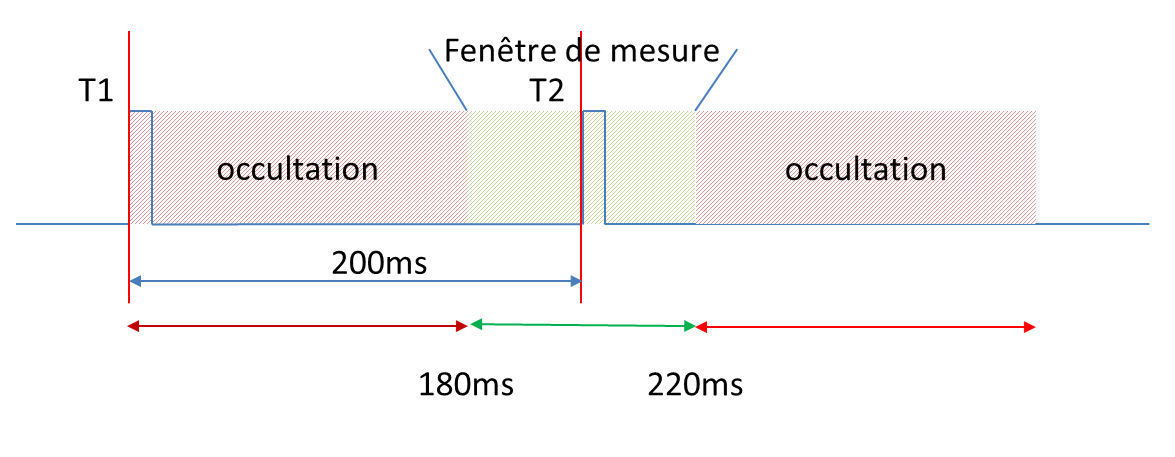
Note : depuis la version 1.4 du logiciel de PC-RM1, le programme gère une durée d'occultation de 1/4 de la demi-période. Si vous avez une montre qui bat à 18000 coups par heure, la demi-période vaut 200ms. La fenêtre de mesure (l'inverse de la fenêtre d'occultation) ira donc de 50ms après le Tic jusqu'à 250ms.
Plus généralement :
Supposons qu'un certain Tic intervienne au temps T1. Le suivant doit intervenir au temps T2 = T1+durée d'une demi période.
La fenêtre de mesure autorisée est centrée sur T2. Les impulsions ne sont prises en compte que dans la zone verte. Si une impulsion survient dans la première zone grisée en rouge (avant T2), elle est ignorée. Si l'impulsion survient au delà de la zone verte, cela signifie probablement qu'un signal a été perdu. Le chronocomparateur ignore cette donnée et tente de se resynchroniser sur une autre impulsion.
Pour une montre qui bât à 18000 coups par heure, la demi-période (durée entre un Tic et un Tac) est de 200ms. Si l'on choisit une durée d'occultation de 9/10, les impulsions ne seront prises en compte qu'entre T1+180ms et T1+220ms.
La trace ci-après vient d'une capture du signal amplifié (en bleu) et du signal résultant après passage par le 555.
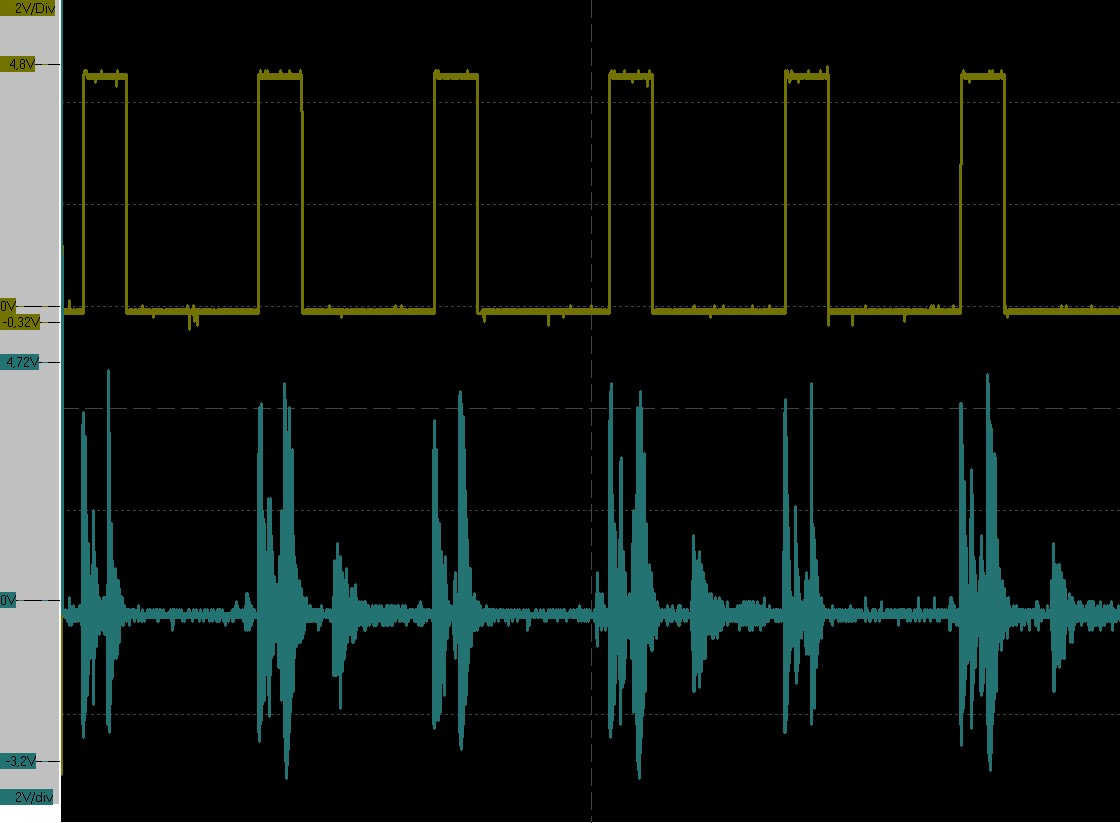
Trace oscilloscope
D3 et D4 ne sont pas présentes sur le schéma du Watch-O-Scope. Je ne les ai pas mises non plus. Toutefois, un capteur piezo peut générer une tension assez élevée qui pourrait détruire l'amplificateur opérationnel. D3 et D4 permettent de limiter la tension d'entrée à +/-0,6V environ.
Le câblage de la prise Jack en entrée est des plus classique. Le corps au (-) du capteur et relié à la masse du montage, le (+) sur la première bague et l'embout (pour un Jack stéréo) ou uniquement l'embout (pour un Jack mono).
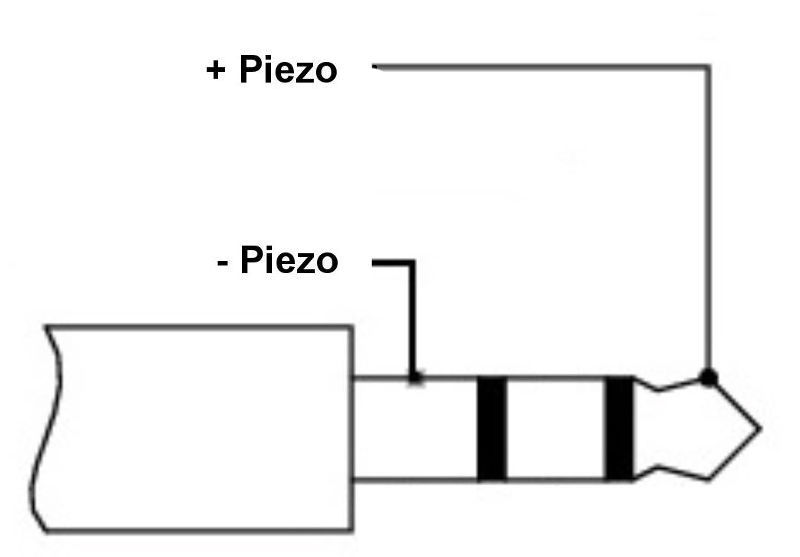
Câblage pour Jack stéréo
Une difficulté
Lorsque j'ai développé ce régleur, je n'ai eu aucun souci de mise au point. Je l'ai essentiellement utilisé connecté en USB à un PC pour développer le programme. Par contre, j'ai eu beaucoup d'ennuis lorsque je l'ai mis en boite, dans mon atelier. Qu'il soit connecté à une alimentation de laboratoire ou à un adapteur USB secteur, les diodes LED s'affolaient et aucune mesure n'était possible sauf... Lorsque je le connectais à mon oscilloscope. Là, tout fonctionnait à merveille. Je passe sur les détails et je vous donne directement la cause du problème : comme me l'a fait remarquer un ami, l'amplificateur a un gain énorme (environ de 70db) et comme l'entrée n'est pas différentielle, il est très sensible aux bruits ambiants et en particulier, aux rayonnements du 50Hz.
La solution est de relier la masse à la terre, ce qui doit être le cas sur un PC mais pas sur un adaptateur 5V. L'autre solution, comme le préconise d'ailleurs l'auteur du Watch-O-Scope, est probablement de mettre le montage dans un boitier en métal relié à la masse... Ce que je n'ai pas fait. Et de s'assurer que la connexion avec le capteur piezo se fait via des câbles blindés et ne soit pas trop longue.
Interface utilisateur
J’ai souhaité réaliser un appareil très simple d’utilisation, ne comportant que très peu de commandes. Cela implique que tout un tas de réglages disponibles sur d’autres appareils ne sont pas présents. Est-ce un problème ? En pratique, non et pour les raisons suivantes :
- les réglages proposés par l’appareil proposé ici sont suffisants pour la plupart des cas de figure.
- Si ce n’est pas le cas, alors, vous avez toujours la possibilité de connecter l’appareil sur un ordinateur et alors, vous disposerez d’une souplesse et d’une facilité d’utilisation que vous n’auriez pas avec un appareil dédié.
L’appareil comporte donc un afficheur LCD, deux LED (rouge/vert), un potentiomètre de volume et un contacteur rotatif.
Optionnellement, vous pouvez ajouter un commutateur pour sélectionner le capteur (microphone intégré ou piezo). C’est ce que j’ai fait mais plus pour expérimenter qu’autre chose. Vous pouvez en pratique vous passer du capteur microphonique intégré.
Le mode d’emploi est donc le suivant :
A la mise sous tension, l’afficheur vous propose un nombre de battements par heure par défaut. Si celui-ci ne vous convient pas, tournez le contacteur dans un sens ou dans un autre jusqu’à ce que le nombre de battements par heure vous convienne.
Menu de sélection des battements
Les valeurs disponibles sont programmées. Il n’y a pas de recherche automatique du nombre de battements. Ce n’est pas que cette fonction soit difficile à réaliser mais en pratique, elle n’est pas très fiable, surtout si votre montre est très déréglée.
Une fois que le nombre de battements par heure est sélectionné, appuyez sur ce même contacteur pour déclencher la mesure.
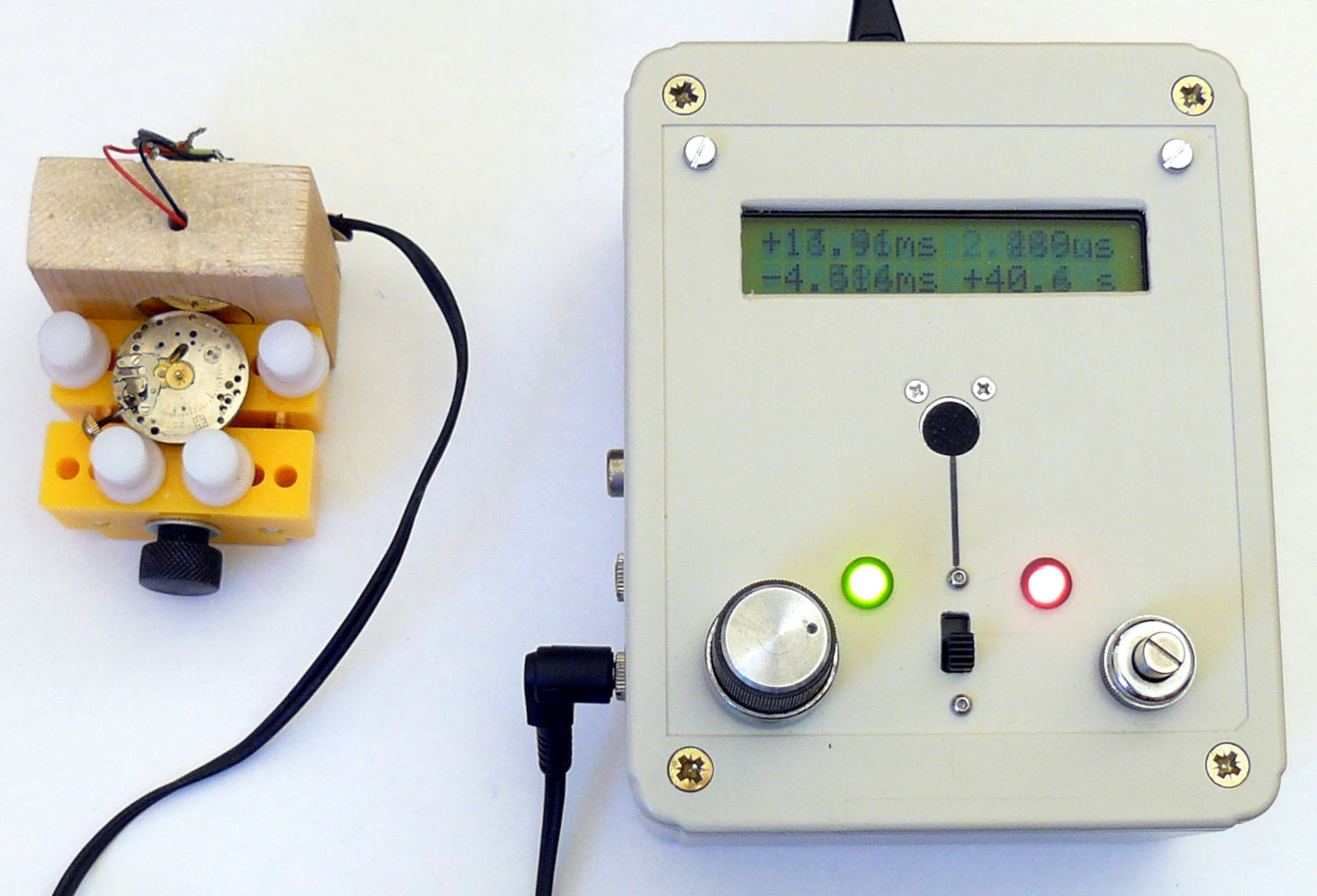
Ecran de mesure
Plus généralement, l’appui sur le contacteur déclenche la mesure si elle n’est pas en fonction ou la met en pause (un appui) ou l’arrête (deux appuis) si elle est en fonction.
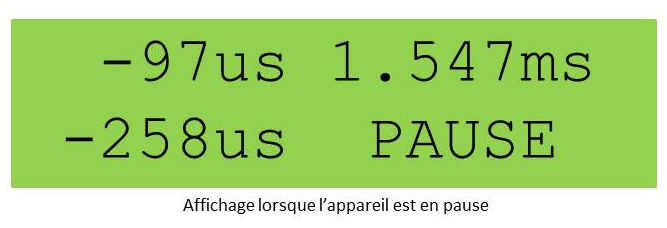
Appareil en pause
L’autre bouton sert de réglage du volume. En pratique, vous ne devriez pas avoir à y toucher après le premier réglage, sauf si vous changez de capteur.
Le volume est correctement réglé lorsque les deux LED battent alternativement de manière régulière.
Si les LED ne clignotent pas alternativement, cela signifie que le volume n’est pas assez élevé. Si une ou les deux LED sont toujours allumées, c’est que le volume est trop élevé.
Si les LED clignotent de manière erratique, il est probable que le volume est trop ou pas assez élevé, ou que votre montre a un très gros problème qui va au-delà d’un simple réglage.
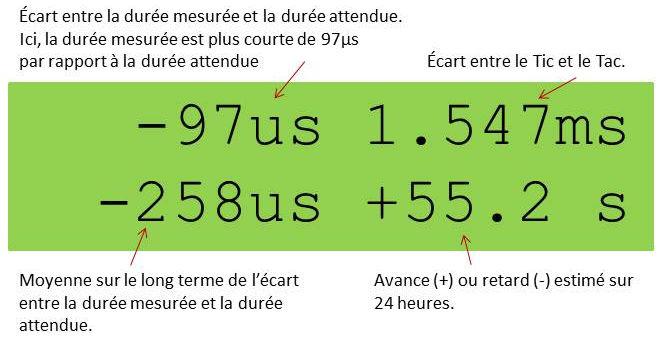
Une fois la mesure déclenchée, l’afficheur affiche :
- En haut à gauche : la différence en plus ou en moins entre les périodes mesurées et la période attendue. Il s’agit d’une valeur moyenne sur une vingtaine de mesures. Le signe + signifie que la période mesurée est supérieure à la valeur attendue. Le signe moins signifie que la période mesurée est inférieure à la période attendue.
Donc, si l’on a un signe +, la montre retarde. Si l’on a un signe -, la montre avance.
Si l’on agit sur la raquette d’avance/retard pendant la mesure, il faut attendre une dizaine de secondes pour que l’affichage soit de nouveau significatif. - En haut à droite : la différence en valeur absolue entre le « tic » et le « tac ». Si cette différence est élevée (elle est rarement nulle), un réglage de la raquette du porte piton est à envisager.
- En bas à gauche, la même chose que en haut à droite mais sur le long terme (moyenne calculée depuis le début de la mesure).
- En bas à gauche : l’avance ou le retard estimé par 24 heures. Le signe + indique que la montre avance de la valeur indiquée, le signe - qu'elle retarde de la valeur indiquée).
Lorsqu’il n’y a pas de valeur significatives à afficher (pas de mesures réalisées), les valeurs affichées sont représentés par des tirets "---".
Les unités d'affichage sont sélectionnées automatiquement par le programme. Elles sont exprimées en µS, ms, s, ou mn. "***" signifie un dépassement de capacité.
En général, on commence par faire un réglage de la différence des périodes jusqu’à ce qu’elle soit la plus proche possible de zéro. Ce réglage devra se faire pour plusieurs positions de la montre (horizontale, verticale…).
Lorsque le résultat semble satisfaisant, on re-déclenche une campagne de mesure et l’on s’intéresse à l’avance ou au retard par heure.
Précision et résolution de l’appareil
La précision et la résolution de l’appareil doivent être définies pour les 3 mesures réalisées :
- La durée d’un battement (par exemple, 400ms pour une montre qui bat 18000 fois par heure),
- L’écart entre un Tic et un Tac,
- L’avance-retard sur une longue période (par exemple, 24 heures).
L’horloge de la carte Arduino utilisée a une résolution de 4µs. Sa précision dépend de celle du quartz et est probablement très inférieure à 1%. On la nommera P% par la suite. Dans ce contexte, on peut dire que :
- La précision de l’écart entre un Tic et un Tac est de +/-4µs à P% près,
- La durée d’un battement est mesurée en sommant la durée des demi-battements. La précision de cette durée est donc inférieure, en valeur absolue, à 8µs à P% près.
Le cas de la mesure de l’avance-retard sur une longue période dépend de la stratégie de mesure sur cette période. Deux grands cas peuvent être envisagés :
- Au démarrage de la mesure, on initialise un compteur C1 (à zéro par exemple). À chaque top d’horloge, ce compteur est incrémenté de 4µs. De la même façon, on initialise un compteur C2 (à zéro par exemple) qui est utilisé pour compter le nombre de battements.
L’avance-retard sera égal à C1 – C2 x P où P est la période du battement (par exemple, 400 ms pour une montre qui bat 18000 fois par heure).
Dans ce contexte, la précision de la mesure est (en valeur absolue) égale à 4µs à P% près. - Une autre façon de procéder consiste à sommer et moyenner la durée des battements mesurés et à multiplier le résultat par le nombre de battements par heure, multiplié par 24 pour avoir l’avance retard sur une journée.
Dans ce cas, on multiplie également l’imprécision due à la résolution. De plus, la précision de la mesure dépendra du nombre de battements par heure de la montre : plus la montre bat rapidement, plus l’imprécision de la mesure augmentera.
Pour une montre qui bat 18000 coups par heure, la précision sur une journée sera (en valeur absolue) de 1,728s à P% près, voire, de 3,456s à P% près si l’on considère la mesure sur les demi battements.
La première stratégie de mesure comporte néanmoins un inconvénient majeur : la mesure ne doit pas être perturbée sur toute la période (par exemple, 24 heures). Or, les capteurs sont sensibles aux chocs et/ou aux sons. Il faudra donc mettre l’ensemble du capteur et de la montre dans un environnement adapté et ne pas intervenir sur la montre durant toute la mesure pour que celle-ci ait un sens.
Cette approche sera à privilégier si l’on souhaite certifier la précision d’une montre mais n’est pas adaptée à la réparation ou au réglage d’atelier.
La seconde stratégie est donc celle utilisée dans la présente réalisation. Elle permet de plus d’éliminer les mesures aberrantes (dues aux chocs accidentels par exemple) et mettre l’appareil en pause lors des réglages.
De plus, on n’est pas forcément toujours malchanceux : on peut penser que les erreurs dues à la résolution se compensent parfois ce qui fait qu’en pratique, la précision sera meilleure que celle calculée qui correspond au pire des cas.
Si l’on veut améliorer la précision dans le cadre de la seconde stratégie, une solution consiste à améliorer la résolution de l’horloge. Le chronocomparateur PC-RM4 en cours de réalisation utilise une horloge à 40MHz autorisant une résolution de 20ns. Dans ce contexte, la précision en valeur absolue sur 24 heures est de l’ordre de 2ms à P% près.
décembre 2018
L'image ci-dessous représente le prototype que j'ai utilisé pour le développement du logiciel. Par rapport à la version finale, on note la présence d'un élévateur de tension continu-continu pour produire du 9V à partir du 5V. Dans cette version, j'utilisait en effet le TL074 du montage originel du Watch-O-Scope.
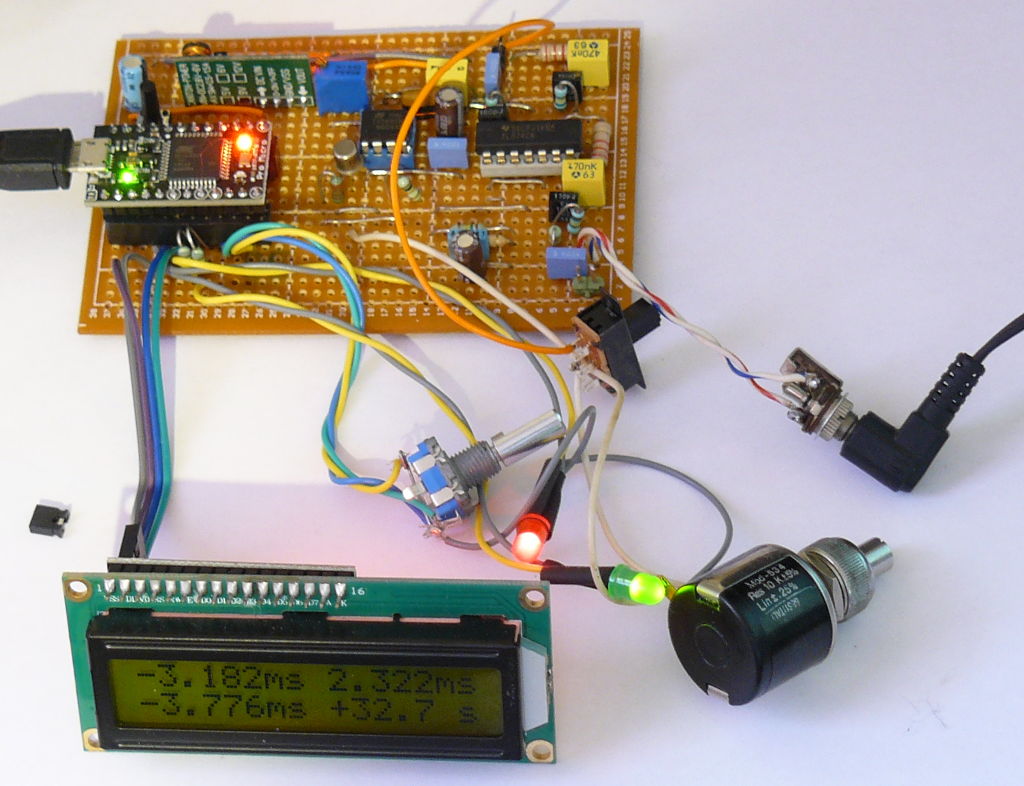
Prototype
Voici deux exemples d'utilisation du microphone intégré. L'un pour une montre chinoise qui bat à 21600 coups par heure, l'autre une Timex qui bat à 18000 coups par heure. A noter que dans cette version, le programme affichait l'avance retard par heure et non par jour.
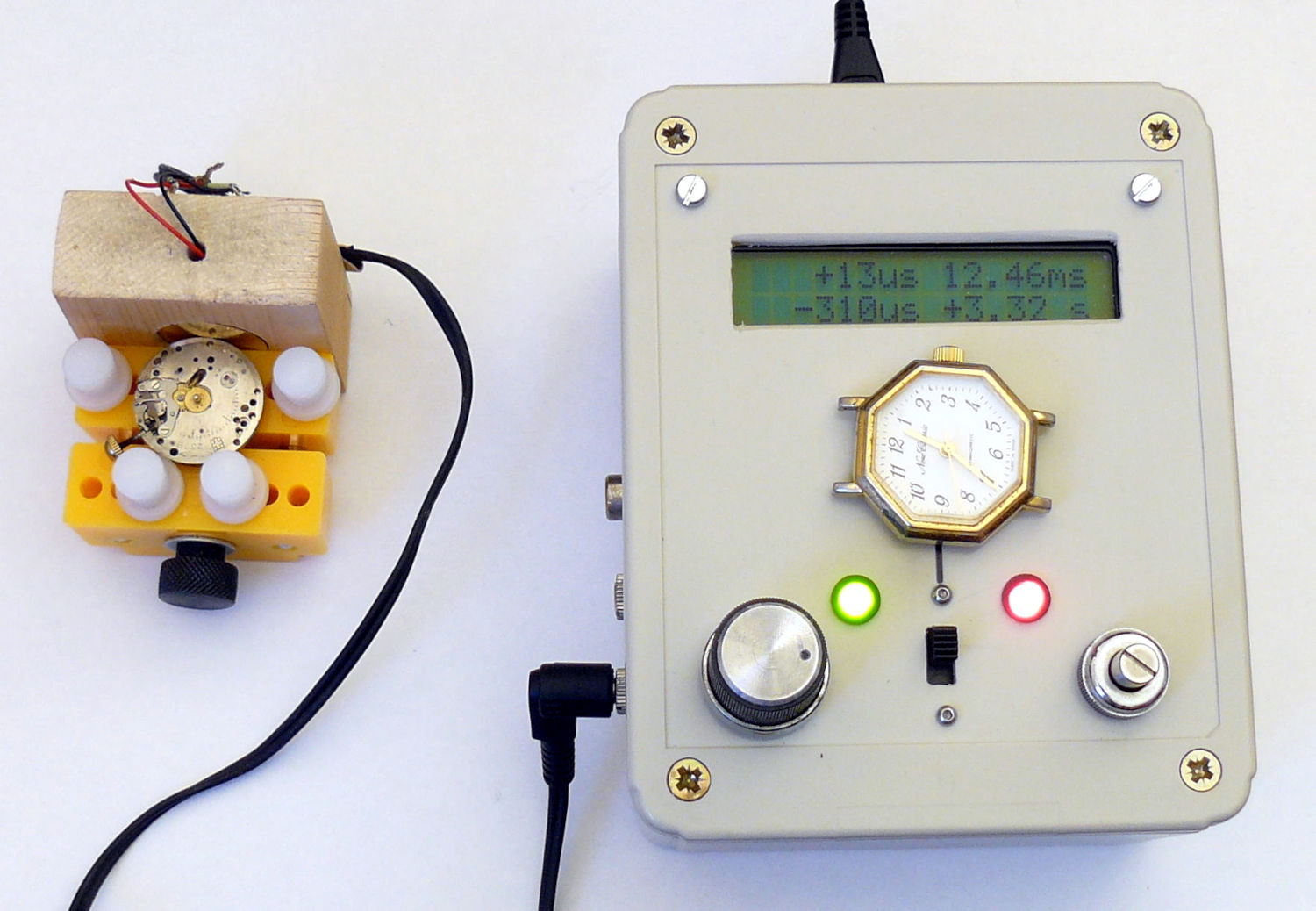
Utilisation du microphone intégré
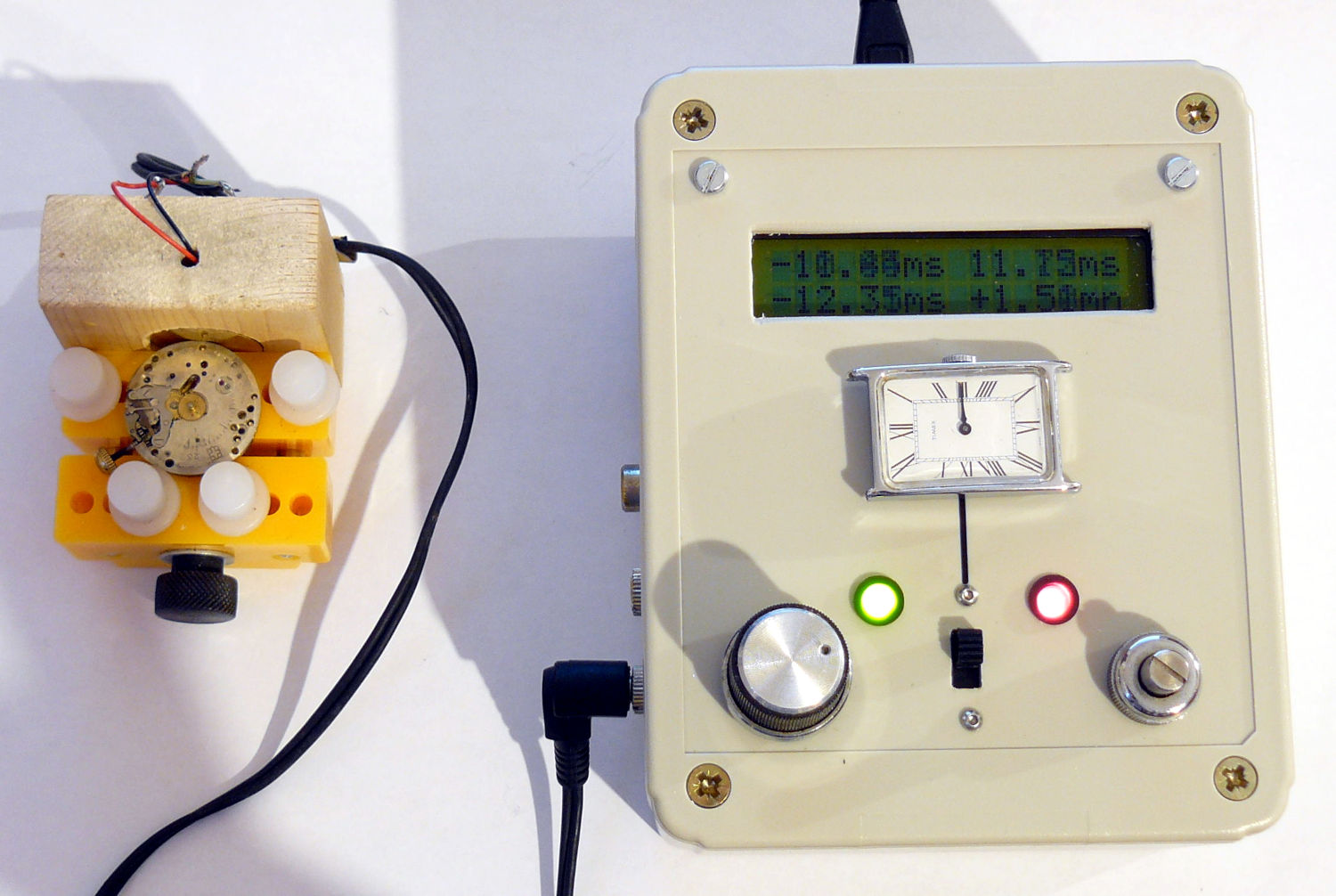
Utilisation du microphone intégré
