



CHOUR - chronocomparateur RM5 pour horloges

Appareil : Chronocomparateur pour horloges à balancier
Date : juillet 2023
Type : PC-RM5
Marque : Chour
Dernière version logicielle : V1.1 du 31/07/2023 (correction d'un bug sur l'AR jour par rapport à la version 1.0)
Principaux constituants : Arduino mega 2560 rev V3, afficheur graphique tactile, capteurs (voir par exemple PC-RM2-OPT-1, PC-RM2-OPT-2, PC-RM2-OPT-3...)
Préambule
L'appareil présenté ici est spécifiquement destiné au réglage des pendules à balancier. Il complète la série de chronocomparateurs visibles sur ce site qui sont plutôt destinés au réglage des montres mécaniques (ceci-dit, PC-RM4 peut aussi être utilisé pour le réglage des horloges, mais il est plus complexe à réaliser).
Ceux qui se sont intéressés à PC-RM3 lui trouveront peut-être un petit air de famille avec PC-RM5 (le présent appareil). Ils auront raison ! Depuis que PC-RM4 a été conçu, PC-RM3 n'est plus. Je l'ai démonté afin de récupérer ce dont j'avais besoin pour faire le présent chronocomparateur. D'où parfois une implantation qui peut sembler bizarre pour la LED, le connecteur DIN ou RCA. Il fallait que je réutilise les trous du boitier faits pour PC-RM3 ! Rien ne vous oblige à faire de même...
informations connexes
Principe des montre mécaniques
Capteur pour chronocomparateur pour avoir des idées sur la façon de faire un capteur.
Présentation
L’appareil présenté sur cette page est donc destiné au réglage des horloges. Il utilise un capteur optique comme ceux présentés sur cette page.
Il se caractérise par un très faible coût (en 2023, environ une vingtaine d'Euros pour la carte Arduino et son écran graphique, une trentaine d'euros avec le reste des composants si vous n'avez rien de rien !), une précision largement suffisante pour le réglage des horloges et une utilisation très simple.
Si vous souhaitez en savoir plus sur le réglage des montres et des horloges, vous pouvez consulter cette page.
Quelques caractéristiques de l'appareil
Ce régleur de montre vise :
- Un coût de réalisation très faible (environ 30€ et un peu d'huile de coude).
- Une taille réduite afin de pouvoir être facilement posé sur une paillasse toujours trop encombrée…
- Une très grande facilité d’emploi.
- Une bonne précision de mesure.
Les principales caractéristiques et fonctionnalités sont les suivantes :
- Alimentation via USB en 5V.
- Saisies par écran tactile et affichage sur écran graphique.
- Affichage automatique de la période du balancier
- Sélection d'une période visée pour le réglage de l'horloge.
- Affichage de l'écart entre l'aller et le retour du balancier.
- Affichage de l'avance ou du retard sur 24H00 par rapport à la période visée.
- Résolution théorique de 4µs et précision théorique de 0,1% (voir le chapitre consacré à ce sujet pour en savoir plus).
Mode d'emploi
Note : l'appareil dispose d'un connecteur DIN pour le branchement du capteur optique. Il peut aussi avoir une LED qui signale le passage du balancier devant le capteur et une sortie RCA qui permet de récupérer le signal fourni par le capteur pour utilisation par un autre appareil. Ces deux derniers éléments sont facultatifs. Par contre, le mode d'emploi considère qu'ils sont présents. Si vous ne les avez pas mis en place, il suffit d'ignorer les commentaires où ils sont référencés.
Principe général du réglage
Un capteur optique (exemple : PC-RM2-OPT-1, PC-RM2-OPT-2, PC-RM2-OPT-3) est connecté sur la prise DIN de l'appareil.
Il y a deux grands cas de figure à considérer :
- On connait précisément la période du balancier. Dans ce cas, pas de difficulté. On entre cette période visée dans l'appareil (bouton "Manuel" pour la saisie en milliseconde de cette période), on positionne le capteur optique, on lance le balancier et on appuie sur le bouton "Mesure" de l'appareil. Celui-ci affiche alors les périodes mesurées du balancier, la différence de temps entre l'aller et retour du balancier et l'avance-retard sur 24H00. On règle le balancier pour minimiser l'avance-retard (idéalement 0).
- On ne connait qu'imparfaitement, voire, pas du tout la période visée. La suite donne une approche pour la déterminer.
La méthode générale pour la détermination de la période visée peut se faire ainsi (le capteur est supposé positionné pour mesurer la période du balancier et le balancier est supposé être en mouvement) :
- On commence par mesurer la période courante du balancier en appuyant sur le bouton "Période".
- Lorsque la valeur de la période affichée par l'appareil est stabilisée (ça peut prendre quelques minutes), on attribue cette période mesurée à la période visée en appuyant sur le bouton "Affect".
- On note l'heure indiquée par l'horloge et l'heure indiquée par une base de temps de référence (par exemple, une montre électronique)
- On attend "un certain temps" (disons 24H00) puis on saisit l'heure affichée par la base de référence, celle de l'horloge, la période visée et l'avance-retard indiquée par l'appareil dans la feuille de calcul téléchargeable sur cette page.
La feuille de calcul donne alors la période que devrait avoir le balancier pour que l'horloge donne l'heure juste. - On repporte cette période dans la période visée (bouton "Manuel" pour la saisie en milliseconde de cette période).
- On régle la longueur du balancier pour minimiser l'avance-retard par jour (idéalement, 0).
Mise sous tension
L'appareil fonctionne dès qu'il est alimenté via sa prise USB.
La LED du chronocomparateur s'allume durant 0,5 seconde puis s'éteint.
Le premier écran affiché donne la référence du modèle (PC-RM5) ainsi que le n° de version du programme chargé. Cet écran reste affiché 1 secondes
L'écran suivant est celui utilisé pour la mesure. Il affiche :
- La moyenne depuis le début des mesures de la période du balancier (ou - tant que l'on n'a pas démarré la mesure).
- La moyenne des dix dernières mesures de la période du balancier (ou - tant que l'on n'a pas démarré la mesure).
- L'écart entre l'aller et le retour du balancier (ou - tant que l'on n'a pas démarré la mesure).
- L'avance-retard par jour de la mesure en cours par rapport à la période visée (ou - tant que l'on n'a pas démarré la mesure).
- La dernière période visée utilisée (1000 à la première mise sous tension).
- Un menu permettant d'accéder aux différentes options.

Appareil en cours de mesure avec l'indicateur d'erreur en noir sur fond jaune marqué "Mesure" (voir plus loin)
Menu
Manuel : permet de saisir une valeur en milliseconde de la période visée pour le banlancier.
Affect : permet de transférer la période moyenne mesurée dans la période visée.
Mesure : permet de démarrer une campagne de mesure.
Période : permet de mesurer la valeur de la période courante du balancier mais sans mettre à jour l'avance-retard par jour.
Pause : permet de mettre en pause la mesure en cours (option active au lancement du programme).
Réinit : permet de réinitialiser toutes les mesures (pas de changement de la période visée). On peut appuyer sur ce bouton à tout moment.
Pour ce qui suit, on suppose que le balancier de l'horloge est en mouvement et que le capteur est correctement positionné. La LED sur PC-RM5 doit s'allumer et s'éteindre au rythme du passage du balancier devant le capteur.
Mesures de la période courante
- Appuyez sur le bouton "Période".
- PC-RM5 affiche la moyenne de cette période depuis le début de l'appui sur le bouton, la moyenne glissante sur les 10 dernières mesures et la différence de durée entre un aller et un retour du balancier. Lorsque les deux valeurs sont très proches, on peut considérer que l'on a déterminé la période courante avec suffisamment de précision.
Initialisation de la période visée
On peut procéder de deux façon :
- On saisi manuellement la valeur de la période (en millisecondes) en appuyant sur le bouton "Manuel".
- On appuie sur le bouton "Affect". La valeur mesurée est alors transférée dans la période visée.
Saisie manuelle de la période du balancier

L'écran affiche un clavier de saisie (chiffres de 0 à 9), la valeur courante de la période visée et 3 touches de fonction :
- "V" : validation de la saisie.
- "C" : mise à zéro de l'afficheur.
- "A" : annulation de la saisie (pas de modification de la période visée initiale).
On saisit la valeur de la période visée en millisecondes (maximum, 99999) puis on appuie sur "V" pour valider la saisie (par exemple).
En sortie de cet écran, l'écran principal est réaffiché avec la valeur courante de la période visée et les périodes et écarts mesurés précédemment. Par contre, l'avance-retard éventuellement précédemment mesuré est réinitialisé.
La valeur 0 n'est pas prise en compte.
Mesure de l'avance-retard
La période visée étant initialisée, on appuie sur le bouton "Mesure". En plus de la mesure de la période et de l'écart entre l'aller et le retour du balancier, l'appareil affiche l'avance-retard sur 24 heures entre la période détectée par le capteur et celle attendue par PC-RM5. Le réglage du balancier vise à minimiser, soit cet écart, soit l'écart entre la période mesurée et celle visée.
Dans ce mode, on peut voir apparaitre un indicateur "Mesure" sur fond jaune au dessus du bouton "Mesure". Si c'est le cas, cela signifie que l'appareil détecte des périodes de balancier supérieures à deux fois la période visée. Ces valeurs sont éliminées par l'appareil.
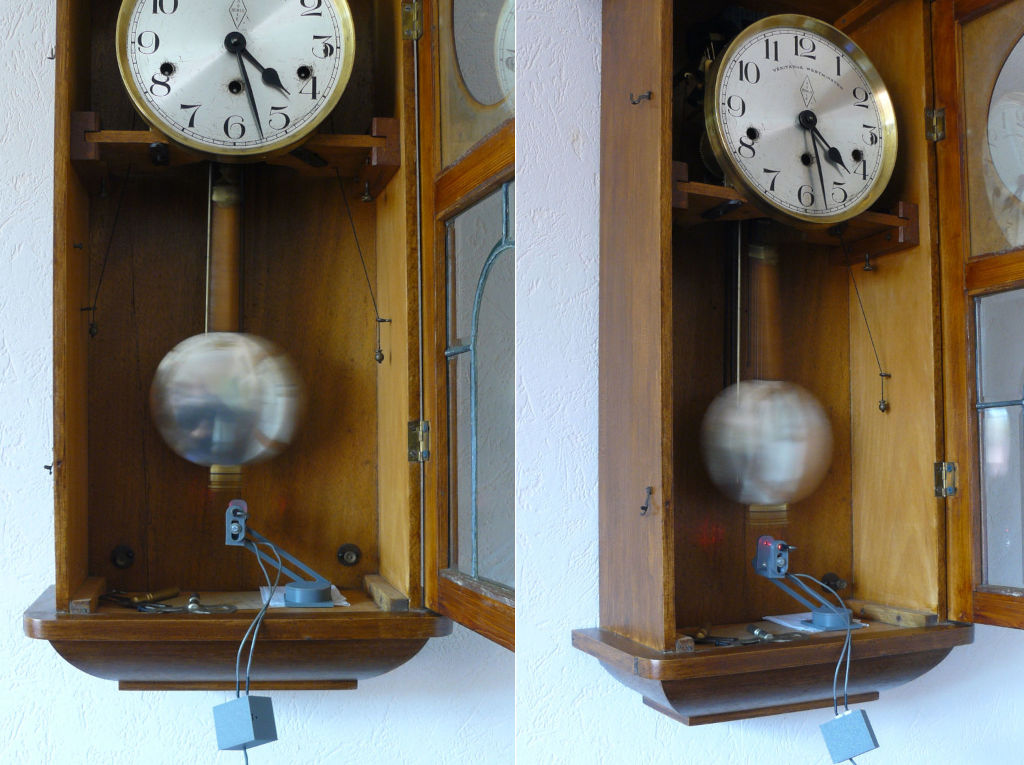
La photo ci-dessous montre le capteur du chronocomparateur PC-RM2-OPT-3 en cours d'utilisation avec le chronocomparateur pour régler une horloge Westminster.
Réalisation
Microcontrôleur et afficheur
Le microcontrôleur est un Arduino Mega 2560 16MHz avec son écran associé 480x320 que l’on trouve pour environ 20€ en 2023. Son programme est en téléchargement sur cette page.
Arduino 2560 R3
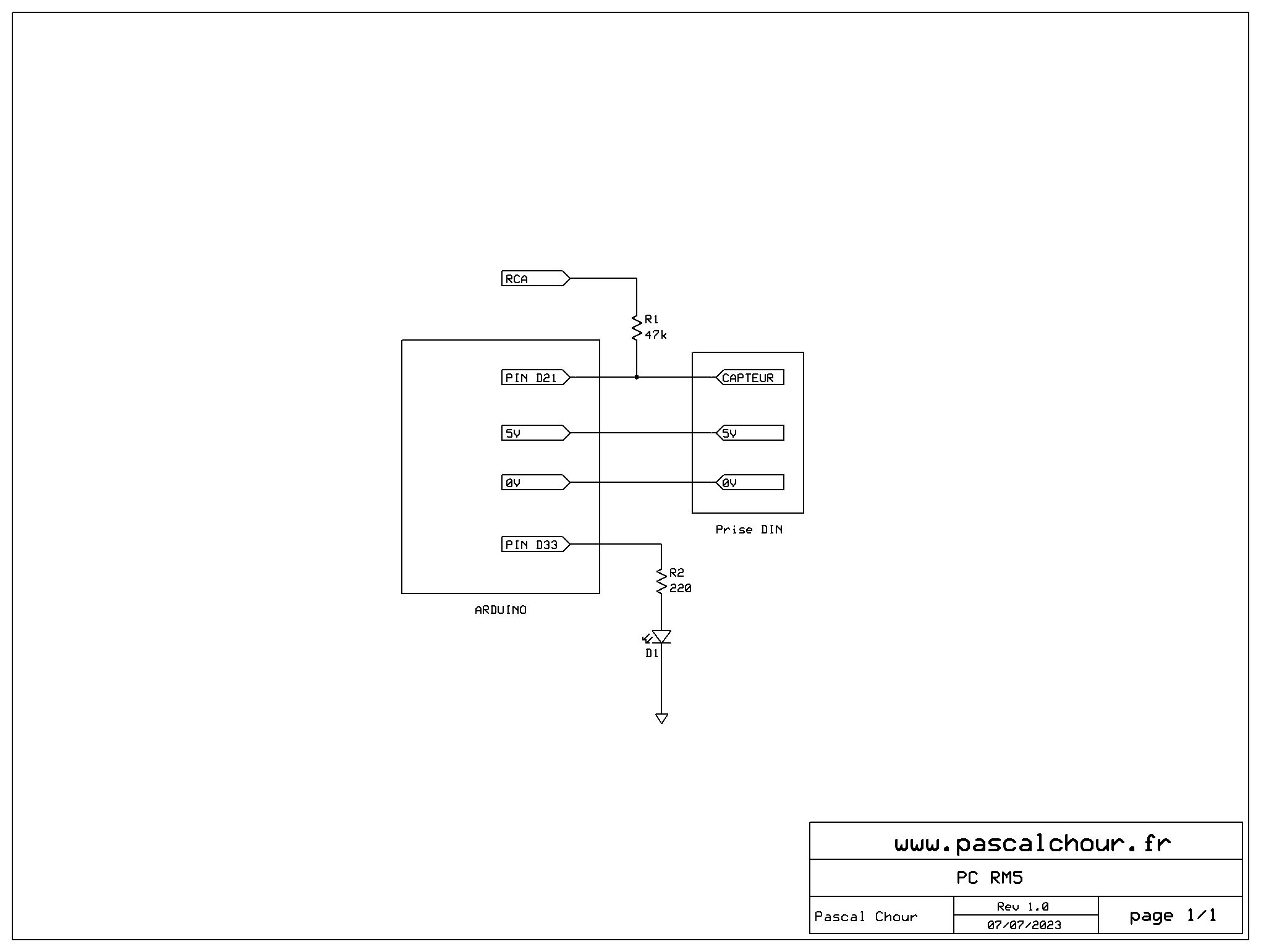
La prise DIN sert à connecter le capteur. Deux broches permettent de fournir l'alimentation de 5V, une autre broche permet de récupérer le signal venant du capteur.
D31 de la carte Arduino sert à lire le signal venant du capteur. D33 fournit l'alimentation pour la LED (via une résistance de l'ordre de 220 ohms) qui s'allume et s'éteint au rythme de l'oscillation du balancier.
Le schéma de câblage est le suivant :
Le chargement du programme dans la carte Mega 2560 se fait via l'environnement de développement Arduino.
Le programme est écrit de façon "bourrin" (la plupart des paramètres sont "en dur" dans le programme). Mais il est suffisamment petit et simple pour que cela ne pose pas de problème si vous souhaitez le modifier.
Pour le recompiler, vous devez installer les bibliothèques "EEPROM", "limits", "Adafruit_GFX" et "MCUFRIEND_kbv", toutes téléchargeables par l'environnement ou disponibles gratuitement sur le Web.
Dans ce programme, l'entrée du signal se fait sur la Pin 21 de l'Arduino (il faut une GPIO qui accepte les IT). La sortie de la diode se fait sur la Pin 33. La prise DIN doit avoir une Pin pour la masse, une autre pour le 5V et une dernière pour le signal du capteur.
Précision et résolution de l’appareil
La précision et la résolution de l’appareil doivent être définies pour les 3 mesures réalisées :
- La durée d’une oscillations,
- L’écart entre un aller et retour du balancier,
- L’avance-retard sur une longue période (par exemple, 24 heures).
L’horloge de la carte Arduino utilisée a une résolution de 4µs. Sa précision dépend de celle du quartz et est probablement très inférieure à 0,1%. On la nommera P% par la suite. Dans ce contexte, on peut dire que :
- La précision de l’écart entre un Tic et un Tac est de +/-4µs à P% près,
- La durée d’une oscillation est mesurée en sommant la durée des demi-oscillations. La précision de cette durée est donc inférieure, en valeur absolue, à 8µs à P% près.
La précision globale sur 24 heures pour un balancier qui bat la seconde est inférieure à une seconde dans le pire des cas.
juillet 2023
